煤矿机器人关键技术与应用场景分析
时间:2024-02-04 作者:裴文良 来源:智能矿山网 分享:煤炭作为重要的能源资源,其开发利用面临着日益复杂的生产环境和安全挑战。为提高生产效率、降低成本、确保矿工安全,煤矿智能化技术被广泛应用于煤炭开采。煤矿机器人结合机器学习与人工智能技术,逐渐被应用于煤矿生产与安全管理。
煤矿机器人具备自主导航、环境感知、生产作业和数据采集等功能。其采用先进的传感器、导航系统和控制算法,能够在复杂、恶劣的矿山环境下协助或代替人工进行危险作业。在传统的煤矿生产过程中,人工操作存在较高的风险,而且不能满足现代化煤矿的安全高效生产需求。因此,集成了机器人技术和智能化技术的煤矿机器人可以保障更高效、安全地生产,成为煤炭行业转型升级的重要技术。
随着煤矿机器人及智能化技术的快速发展,我国对煤矿智能化建设给予了政策上的支持。2020年,国家八部委联合发布了《关于加快煤矿智能化发展的指导意见》,明确了煤矿智能化的主要发展目标、主要任务以及保障措施等内容。2021 年,工业和信息化部、国家矿山安全监察局等十五部门联合发布了《“十四五”机器人产业发展规划》,提出机器人创新产品发展行动,研制消防、应急救援、安全巡检等危险环境作业机器人,提出面向制造业、采矿业等行业,重点推进工业机器人、特种机器人重点产品的研制及应用,开展试点示范,拓展应用空间,鼓励用户单位和机器人企业联合开展技术试验验证。2023 年,工业和信息化部联合十七部委发布了《“机器人+”应用行动实施方案》,提出深化重点领域“机器人+”的应用,聚焦重点领域的典型应用场景,尤其是能源、安全应急和极限环境应用等重要场景,开展系统推进工作。
煤矿机器人应用现状
随着国家政策的大力支持以及煤矿机器人技术的不断发展,其应用场景将会十分广泛,包括:(1) 对狭小矿井空间进行探测和勘探,从而获取如煤层厚度、品质和瓦斯含量等地下矿藏的详细信息。(2) 通过传感器及深度学习算法实时监测设备的运行情况,对故障进行预测并及时进行设备维护,从而减少设备故障。(3) 实时采集数据并进行数据分析,为工作人员提供煤矿的安全报告及预警信息,使工作人员能实时了解煤矿的安全状态及风险信息。
虽然煤矿机器人有着广泛的应用前景,但还存在诸多问题:(1) 技术端问题:煤矿机器人的相关技术仍处于发展初期,一些关键技术,包括机器学习、自主导航、感知与识别等尚未成熟,限制了智能机器人的性能和功能。(2) 产品端问题:煤矿环境恶劣,存在很多不可预测的因素,机器人在应对恶劣环境方面的适应性还有待提高。同时,复杂的煤矿场景需要机器人具备多样性功能,功能模块之间的适配性以及机器人的功能切换能力、集成能力还有待提高。(3) 人机交互问题:人机协作能力有限,机器人在处理复杂任务时较难与现场工作人员进行有效的沟通和理解。
因此,对于煤矿机器人的研发,企业应具备适应环境的、成熟的科研技术,打破技术壁垒,实现高灵活度的人机交互。
煤矿机器人应用场景及功能分析
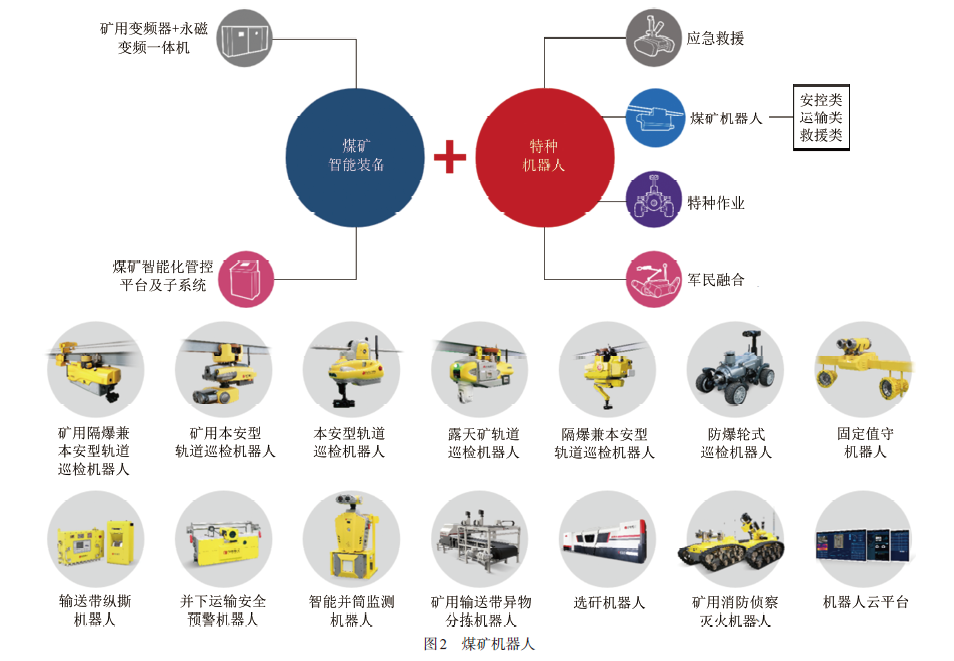
中信重工开诚智能装备有限公司(简称开诚智能) 研制出70 余款煤矿机器人、煤矿智能化管控系统和传动装备,应用覆盖了煤矿的巡检、通信、选矸、运输、提升、综采、供电、通风、排水、救援等多个场景。此类技术产品能够与“矿鸿”系统实现无缝连接,为煤矿实现智能化转型升级提供可靠的技术支持。煤矿智能化作业体系如图1 所示。

在煤矿机器人方面,开诚智能已研发出智能井筒监测机器人、井下运输安全预警机器人、防爆轮式巡检机器人、智能选矸机器人、防爆轨道巡检机器人、输送带纵撕检测机器人、防爆固定值守机器人、矿用消防机器人、煤化工巡检机器人等10 余类(图2),可执行井下巡检、值守、洗选、侦测、预警、救援等多类型任务,可有效推进早日实现矿井固定岗位的无人值守和危险岗位机器人代替人工作业。
带式输送机应用场景
带式输送机工作场景要求机器人能够完成巡检、执行以及监护任务,通过闭环的监护流程实现带式输送机全方位防护。应用的机器人包括轨道巡检机器人、异物分拣机器人和纵撕监测机器人,如图3所示。

带式输送机工作场景下需要长距离的沿线巡检,并且受到恶劣巷道环境的影响,人工巡检的质量得不到保证。具有高度前端智能识别功能的隔爆兼本安型轨道巡检机器人(图3a) 能够在钢丝绳驱动系统的牵引下,实现机器人在轨道上的往复运行、自主发电,24 h 不间断巡检。此外,该机器人搭载智能感知算法,能够实现输送带跑偏识别、人员穿戴识别、危险行为识别、危险区域报警、温度异常报警、声音异常报警等多项功能,对当前设备的运行状态做出准确判断。
在输送带运输过程中,可能会因为异物导致输送带纵撕事故的发生。因此,从源头上降低异物在输送带上出现的概率是减少纵撕事故发生的关键。输送带异物分拣机器人(图3b) 搭载防爆模块化执行系统,能够满足煤矿不同带速、带宽的需求。其原创性的抓取机构具有体积小、响应快、负载能力强等特点,并且融合了前端识别与多自由度直角坐标机械手技术的分拣机器人,能实现煤矿环境下的精准定位。
但降低异物出现的概率并不代表能够杜绝输送带纵撕隐患,发生事故后能够在最短时间内预警和发现故障变得尤为重要。纵撕监测机器人(图3c)能够自动识别输送带表面纵撕、划伤、脱胶等故障,并进行故障状态的判断与分类,纵撕监测机器人具有较高的故障识别精度,能够在不高于30 m/s 的运行带速下识别最小长度1 mm的输送带划伤。
井下机电硐室应用场景
井下水泵房、变电所、绞车房、瓦斯泵房等机电硐室场景需要机器人完成设备的巡检防护任务。
采用四轮差速驱动模式的防爆轮式巡检机器人(图4a),依托于激光导航融合技术克服了GPS环境拒止限制,能在多种煤矿场景完成自主导航、高精度巡检以及智能识别任务。该机器人具备气体监测、红外测温、智能音视频识别等全方位监测手段,同时加入了“矿鸿”系统,为机器人对于井下场景的全方位防护提供了保证。
对于地面设备在空间较为狭小的环境下,采用本安型轨道巡检机器人(图4b),其本体安装在圆形钢管轨道上,体积小、质量轻、检测范围广、灵敏度高且不占用地面面积,集成了双目相机防抖和跟随云台摄像仪,环境适应能力强,能够在煤矿水泵房、变电所、绞车房等重点巡检区执行智能识别、温度监测、环境监测等巡检任务。

其他应用场景
(1) 选矸
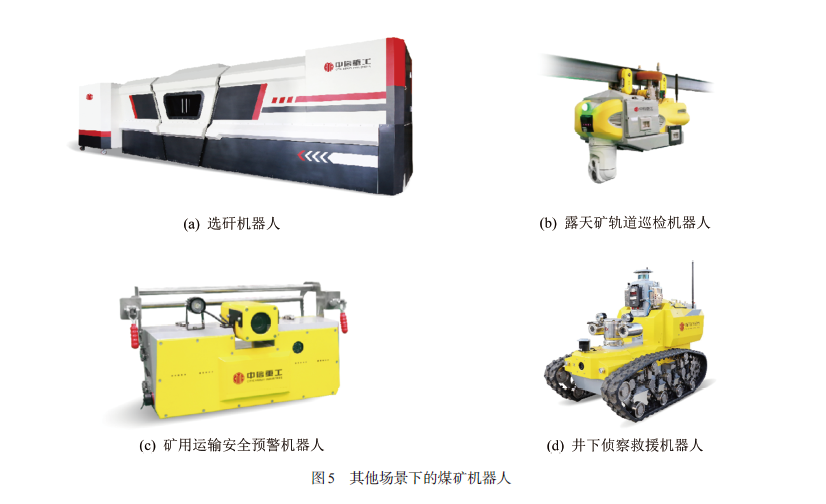
传统的人工选矸需要选矸工人分布在10~20 m的手选输送带上,这需要消耗大量的人力资源,且人为选出矸石或煤块工作效率低,分选质量差。为解决这一问题,研制了选矸机器人(图5a)。选矸机器人分为X射线和视频2 种选矸系统,可根据选煤、选矸工艺需求进行合理配置,并通过数据远程监测和管理实现真正意义上的自动化生产。
(2) 巡检
对于户外环境下煤矿设备的巡检需求,研发了国内第一款能够应用于露天户外低温环境使用的露天矿轨道巡检机器人(图5b)。该机器人整机采用超低温设计,能够满足−40 ℃~50 ℃的低温、高温及多种天气的户外使用需求,并通过搭载的各类监测传感器,利用智能化识别功能对带式输送机驱动站进行全方位的监控防护。
(3) 运输
斜巷运输是运输巷内掘进产生的矿石或大型物品,而传统的固定点监控摄像仪或人为管理为主的安全监控模式,无法及时预防因钢轨上掉落异物或人员闯入导致的运输事故。矿用运输安全预警机器人(图5c) 可用于斜井绞车、无极绳绞车及其他辅助运输设备。集成64 线激光雷达、深度相机、热像仪等,能够实时监测巷道异物、轨道异物、人员入侵及巷道变形情况,及时发现异常并报警。
(4) 监测
针对井下安全监测的需求,研发了集侦察、救援、巡检3 大功能于一体的井下侦察救援机器人(图5d)。该机器人搭载3 个单体基站,可通过mesh组网的方式快速自主地搭建通信网络,延长机器人通信距离,并搭载了3D激光传感器的井下侦察救援机器人,可以实现救援现场的自主巡航及路径规划功能。依托其携带的粉尘浓度传感器、多参数传感器、避障传感器等更加全面的环境探测传感器,可实现井下环境信息的全方位监测。
煤矿机器人关键技术及应用分析
笔者团队实现了基于煤矿机器人的视觉、触觉、听觉、嗅觉、空间感知以及智能交互技术等多领域的应用。
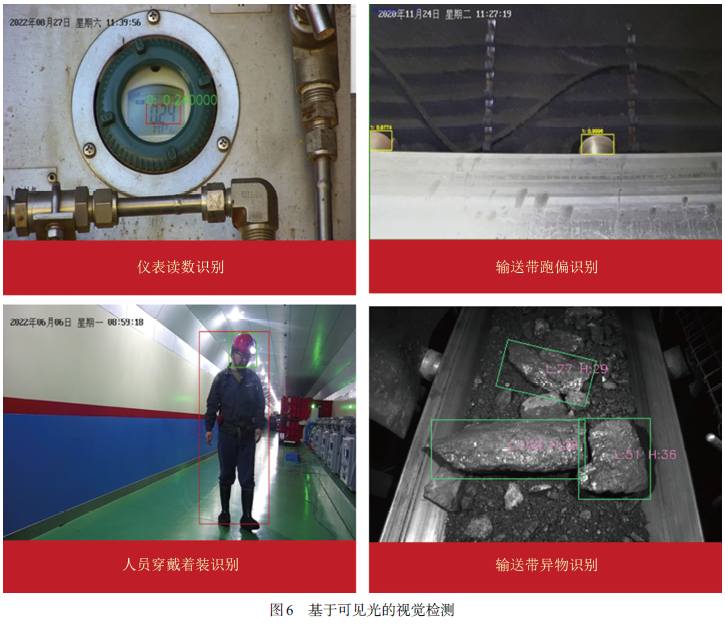
(1) 基于可见光的视觉检测(图6) 包括目标设备检测、关键过程检测、人员相关检测、输送带异物检测。
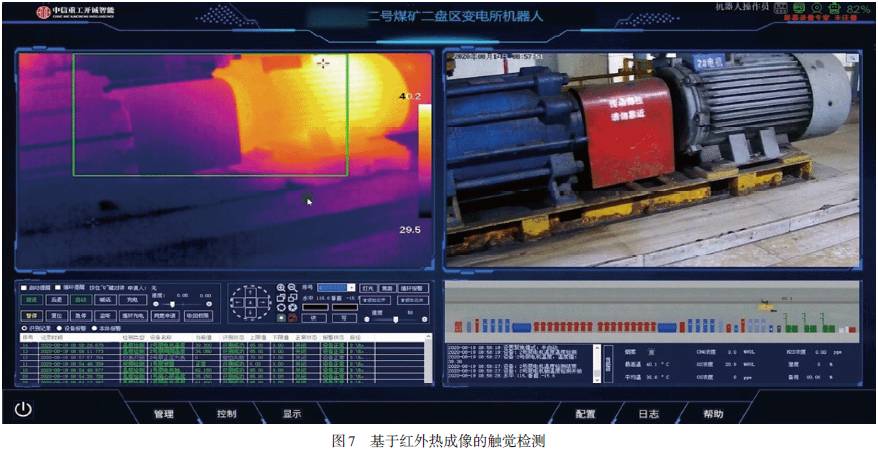
(2) 触觉检测基于红外热成像进行(图7),利用红外热像仪采集带式输送机、电机、传动、泵送等设备的温度信息,对异常超温进行报警。
(3) 听觉检测是一种音频处理技术,可用于识别异常声音。其中,Clear Speech 自适应动态降噪处理技术可以有效地降低噪声干扰,提高音频的清晰度;采用音频特征提取和检测算法,可以分析声音的频谱、时频特征等,进而判断是否存在异常声音。以上技术的结合可以帮助实现音频异常识别功能。
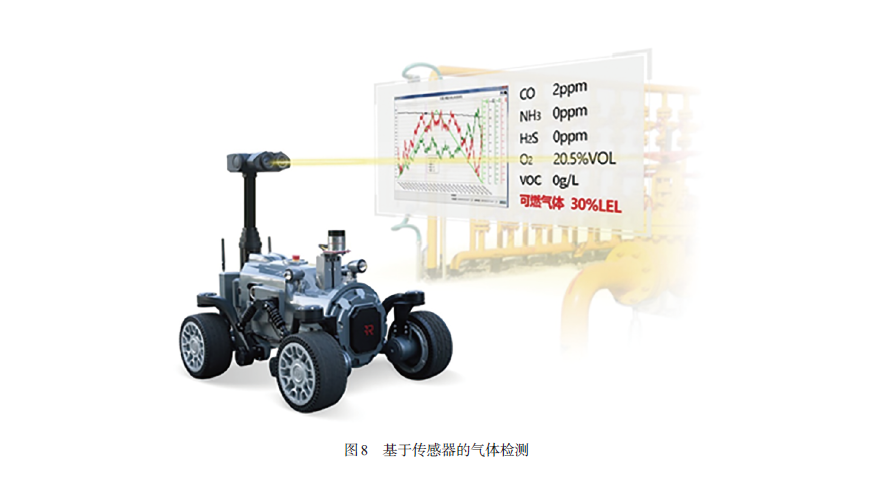
(4) 嗅觉检测(图8) 是一种利用机器人集成的多参数气体探测器和烟雾传感器的技术,用于及时发现气体泄漏和预警火灾。该技术能够解决在人工巡检中可能无法察觉的无色无味气体泄漏问题。通过多参数气体探测器,机器人可以感知环境中的气体浓度,如可燃气体、有毒气体等。当检测到气体浓度异常时,可以及时进行报警和采取相应的措施。烟雾传感器可以帮助机器人在火灾发生时,快速发现并发出警报,以便及时疏散人员和采取灭火措施。此类技术的应用可以提高煤炭生产工作的安全性,并在危险事件发生时提供及时的预警。
(5) 空间感知利用激光点云扫描系统对煤矿井下巷道进行扫描探测,识别巷道岩体结构面,提取分析结构面倾角、倾向、迹长、间距等。
(6) 智能交互技术包括VR 交互和AR 交互,VR 全景交互通过视频拼接算法完成实时的全景拍摄,全景图像通过视频流上传到VR眼镜或上位机,监控人员可以实时观看煤矿内的全景影像,从各个角度掌握机器的运行情况,从而大幅提升巡检的效率。AR交互技术(图9) 是将真实煤矿关键场景与虚拟世界信息“无缝”集成的增强现实技术。该技术将机器人在真实场景时间、空间范围内的本体信息、场景状态感知、传感器信息等实体信息映射到虚拟世界,直观映射真实工作状态。

结 语
未来煤矿机器人建设应在深度结合人工智能领域的前提下,逐步实现模块化、智能化、无人化的发展需求。
首先,随着智能化技术在煤炭行业的发展,煤矿机器人对于不同场景的适应能力是满足日益复杂的煤矿智能化需求的关键。为增强机器人在不同场景下的适应性及通用性,新时代的煤矿机器人应采用模块化的设计,根据现场需求更换不同的功能模块。
其次,随着机器人及智能化技术的革新,能源行业和制造行业正在朝着无人化的方向发展,煤炭行业也应紧跟技术发展的脚步,逐渐在运输场景以及巷道喷浆等特殊场景下真正地实现无人化、智能化。对于煤炭运输场景,应将无线通信技术、传感器技术、新能源及液压伺服驱动等关键技术应用于机器人中,从而加强对机器人的智能化控制,提升人机交互能力。对于巷道喷浆场景,应实现自主路径规划、自动避障、自动平衡、自主行走、自主复位等功能,同时对混凝土配料、搅拌、泵送等各个环节进行协同闭环控制,从而实现自主作业、自主决策、远程操控。上述技术和方法,有助于推动机器人在煤矿领域的进一步发展,提高工作效率,降低风险,并为煤矿行业的安全和可持续发展做出贡献。
- 相关推荐
