大柳塔煤矿5G+连续采煤机器人群协同 作业应用探索
时间:2024-04-24 作者:王飞 来源:智能矿山网 分享:近年来,智能采矿作业逐渐向数字化、网络化、智能化方向发展。相较于综采工作面智能化技术的快速发展,掘进工作面智能化技术发展缓慢。掘进工作面生产设备多、调动频繁、环境恶劣、劳动强度大,瓦斯、粉尘、水害、顶板、设备误动作威胁作业人员的健康安全。随着回采规模的扩大,各矿井普遍存在采掘比例失调、掘进队伍庞大、安全管理难度大等问题,导致安全生产压力较大。
5G+连续采煤机器人群协同作业是一种基于5G技术实现智能掘进作业的方式。通过连接掘进机、运煤车、破碎机等各种机器设备,形成协同作业模式,以提高作业效率和质量。在这种作业方式中,各种机器设备可以通过5G网络进行实时数据传输和通信,实现机器之间的信息共享和协同作业。5G+连续采煤机器人群协同作业可以实现机器的自动化和智能化作业,提高作业的准确性和安全性,例如:通过5G网络传输的高清视频和图像数据,可以实现对机器设备的远程监控和控制,减少人工操作的风险和误差。通过深入研究5G+连续采煤机器人群协同作业的技术原理,探讨其在实际掘进作业中的应用价值和前景,可为煤炭行业的数字化和智能化发展提供重要的技术支持。
国能神东煤炭集团有限责任公司大柳塔煤矿(简称大柳塔煤矿) 利用矿井优势条件为智能化建设搭建发展平台,使智能化为矿井高产高效提供硬件支撑。根据《煤矿智能化建设指南(2021 年版)》井工煤矿智能化建设目标,大柳塔煤矿通过5G网络实现了连续采煤机、锚杆机、破碎机、卷缆车的集中监控,以及与带式输送机、局部通风机、供配电设备在同一平台协同作业,实现了连续采煤机远程控制、自主割煤、人工干预的生产方式,锚杆机自动钻锚、自动间距定位、自动行走与排距定位功能,卷缆车与连续采煤机无缝对接,大柳塔煤矿连采三队52508 掘进工作面实现了减人提效和远程控制目标,形成了一套完整的掘进智能化技术体系。
连续采煤机器人群建设内容
连采工作面主要包括连续采煤机、运煤车、电缆收放车、锚杆钻车、破碎机等设备,对连采工作面的主要设备进行升级后,使其成为智能化设备,即连续采煤机器人、巻缆机器人、运煤机器人、支护机器人、破碎机器人等,形成一个协同作业的机器人群组。掘进工作面智能化程度低,很大程度上受限于现场的工作环境,不能建立合理可靠的通信机制,设备各自独立运行,无法实现各个系统的可靠信息交互。在掘进工作面带式输送机头、掘进机点、通风机点、供电点、转载点布置基站,在运输巷道关键节点布置基站,完成现场5G信号覆盖,利用无线终端、无线控制转换装置、无线高清摄像仪等设备,借助5G网络完成各系统信号的高速传输、可靠融合,在集中操作室,甚至地面调度中心,完成对连续采煤机、钻锚机、通风机、输送机的远程集中操控。
通过对连续采煤机电气控制系统进行升级改造,辅以激光雷达、惯导系统、角度传感器等,实现设备姿态自主调整、自主截割;在集中控制中心,通过视频、音频和设备运行的姿态、方位、状态等信息,远程操作连续采煤机。实现上述操作的关键在于解决远程控制时的软硬件兼容、信息感知、数据传输、电缆管理等问题。连续采煤机是拖曳电缆设备,不便于敷设专用通信电缆,采用无线+有线的通信方式,既可保证通信可靠性,又可保障现场便利性。连续采煤机器人群作业布置示意如图1 所示。
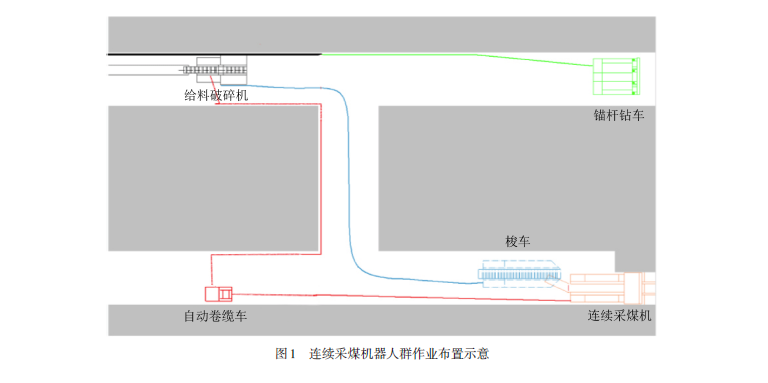
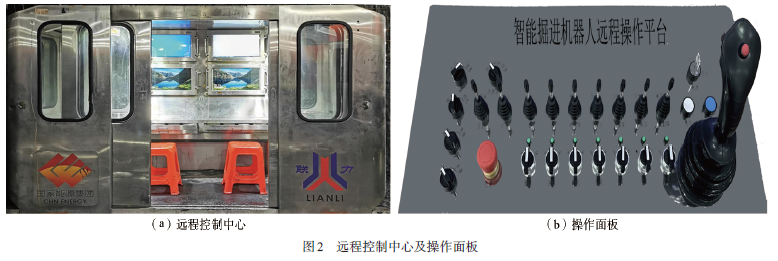
在远离工作面的位置设置集中控制系统,配备连续采煤机和梭车远程控制操作台、卷缆车、给料机等辅助设备,各设备均配备遥控器,具有设备运行状态、故障预警等显示功能;配备防爆计算机,能够对来自连续采煤机的数据进行处理显示,具有视频显示、音频播报功能;梭车具备一键启动功能,可实现自主行走、对接、装载、卸煤、避障、安全预警等功能的自动化。远程控制中心及操作面板如图2 所示。
针对矿井的连续采煤机跟机供电缆,根据连续采煤机运行位置使用合适的电缆长度。当前整个连续采煤机跟机供电线缆采用人工拖拽方式,工人数量和劳动强度较大,并影响生产效率。采用履带式自动电缆卷放车,可配合连续采煤机自动收放电缆。
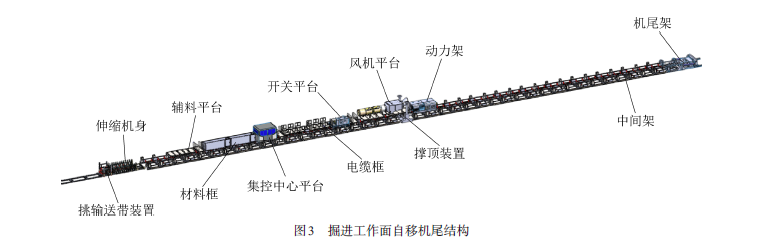
在巷道掘进特别是长距离巷道的掘进过程中,可伸缩带式输送机的快速延伸成为影响巷道快速推进的重要因素,掘进工作面采用自移机尾通过迈步推移机构实现迈步式快速自移和带式输送机机尾的机械化延伸,满足井下使用需求,可提高工作效率,降低劳动强度,改善作业环境,降低安全隐患。掘进工作面自移机尾结构如图3 所示。
连续采煤机器人群协同作业模式
工作面5G 通信集控中心协同连续采煤机作业
借助5G无线通信技术,采用传感器实时采集并显示连续采煤机运行参数、工作状态等信息,工作人员通过视频、监控软件所提供的信息,从工作面撤离至距工作面较远的安全区域进行自动截割作业。应用5G无线传输技术,确保了传输信号的可靠性和稳定性,实现了远程操控无延时传输视频画面。
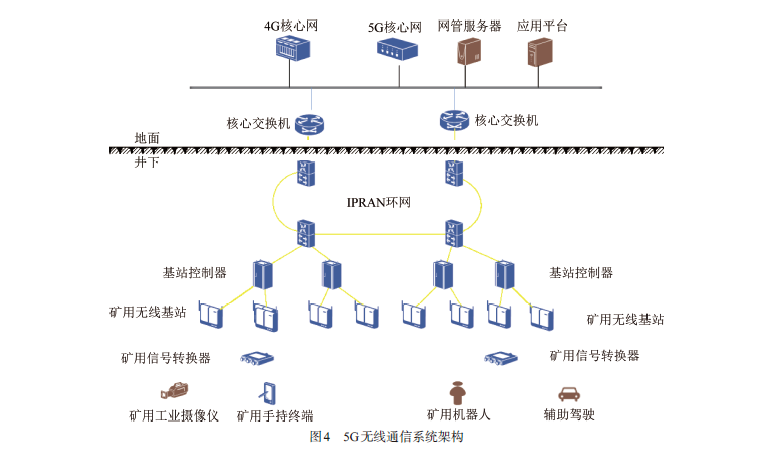
5G无线通信系统主要由地面的5G核心网设备(5GC)、地面操控中心、KT606—K (5G) 矿用隔爆型基站控制器(基带控制单元,BBU+远端数据汇聚单元RHUB)、KT606—F (5G) 矿用隔爆兼本安型无线基站(微型射频拉远单元pRRU)、KZC127 (5G) 矿用隔爆兼本安型信号转换器(CPE)、KT606—S1 (5G) 矿用本安型手机和连续采煤机设备产品构成。掘进工作面部署矿用隔爆型基站控制器,集成BBU和RHUB。BBU是基带处理单元,集中控制管理整个5G基站系统,具备25GE接入环网能力,支持至少4 路25GE RHUB 接入能力;RHUB是射频远端CPRI 数据汇聚单元,具备与BBU25GE级联能力。5G无线通信系统架构如图4 所示。
地面分控中心协同井下分控中心作业
掘进工作面设备远程监控与操作权限全部集中在调度室,存在责任区队对电气设备运行状态监测困难、历史数据调取流程复杂、应急处置信息共享不全等问题。为提高区队值班人员对井下电气设备的监控能力,建设掘进队地面集控室,以实现掘进、支护、运输、供电、通风、供排水、瓦斯、粉尘全系统地面集中监控。通过工业以太网将工作面集控中心数据传送至地面数据中心,工作人员可控制井下连续采煤机远程记忆截割、定位截割、自主截割控制模式,摆脱作业人员强度大、风险高、条件差的作业环境,能够真正地将作业人员从井下艰苦复杂的环境中解放出来,坐在地面分控中心就能实现对井下生产的全过程干预及控制。
连续采煤机控制系统协同智能化作业
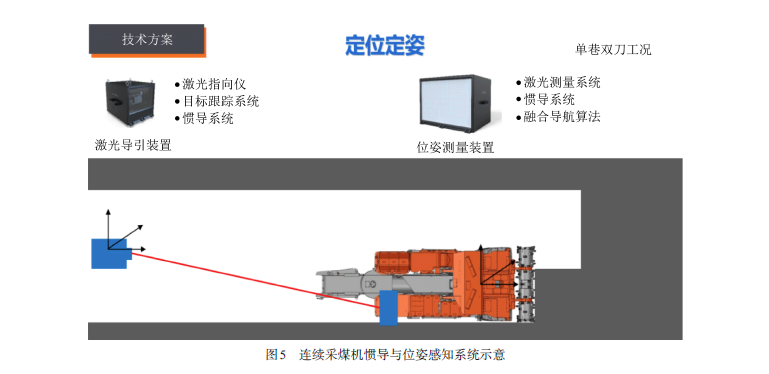
连续采煤机的自动控制功能是智能化掘进的基础,主要通过增设传感器、自动化控制箱实现对连续采煤机动作机构的检测和控制,同时用多个不同类型的摄像仪多角度视频监控,增加系统的安全性。设备的定位定姿定向功能主要依靠“激光导引+组合惯导”进行精确测量,激光导引装置实时追踪定位连续采煤机,组合惯导系统实时提供精确的角度和位置(包括航向角、俯仰角、横滚角以及连续采煤机在巷道里面的精确三维坐标),为自动控制提供位置基础。结合惯导系统提供的连续采煤机位置和姿态信息,控制系统主要实现的连续采煤机运动控制功能包括:①确保单刀前进/后退时按照规定的基线方向走直线;②连续采煤机从左帮到右帮的调机功能;③扫帮时的巷道宽度保证。在单刀进刀时,以实时获取的连续采煤机的航向角信息为测量输入量,采用PID 算法控制2 条履带的行走电流大小,确保一旦发生航向角偏移时,能够及时纠正;截割控制通过结合煤矿截割工艺和连续采煤机司机建议,采用13 步截割法;调机控制采用了“N×V型”调机法,通过连续采煤机的旋转、退机、前进等组合操作,实现连续采煤机的平移。连续采煤机惯导与位姿感知系统如图5 所示。
配套自动卷缆车协同连续采煤机作业
自动卷缆车用于连续采煤机进线电缆收放工作,具备电缆无人收放和定位激光仪自动跟踪、校准功能。通过替换连续采煤机跟机电缆,使用内部4 芯控制线载波通信,实现连续采煤机与自动卷缆车通信。连续采煤机PLC控制箱采集卷车信号,通过跟机电缆4 芯控制线接入连续采煤机馈电开关,并进入工业环网,完成跟机电缆自动收放。
连续采煤机定位定姿系统协同作业
采用惯性导航+激光导引的方式实现连续采煤机定姿定位,惯性导航安装于连续采煤机,激光导引安装于自动卷缆车,两者互为基准,连续测量,实现连续采煤机和自动卷缆车定位定姿定向功能。激光导引装置实时追踪定位连续采煤机,组合惯导系统实时提供精确的角度和位置,包括航向角、俯仰角、横滚角以及连续采煤机在巷道三维坐标中的相对位置,为自动控制提供位置基础。
连续采煤机协同梭车作业
梭车作为掘进工作面的运输设备之一,主要完成在连续采煤机和破碎机之间的运煤工作,运行路线相对固定。截至目前,国内尚无梭车自动运行应用案例。随着科技的不断进步,自动引导运输车在全自动集装箱码头得到广泛应用,目前国内建成了以青岛港、上海国际航运中心洋山深水港为代表的集装箱自动化码头,自动导引运输车自定行程路线,在码头和自动化堆场之间来回运输,实现无区域限制自动运行。梭车驾驶室安装控制器并自带通信天线功能,连续采煤机驾驶室安装基站,两者互相接收,利用无线WiFi 技术实现梭车选择性控制连续采煤机输送机尾的启停和姿态。依据激光雷达建立的三维透视模型,根据巷道和车辆情况,为梭车设计理论轨迹。基于激光雷达特征点识别技术,实现与连续采煤机、破碎机的对接。梭车前后安装毫米波雷达,用于设备接近时的精准检测。梭车与连续采煤机的自动对接示意如图6 所示。

连续采煤机器人群协同作业技术应用
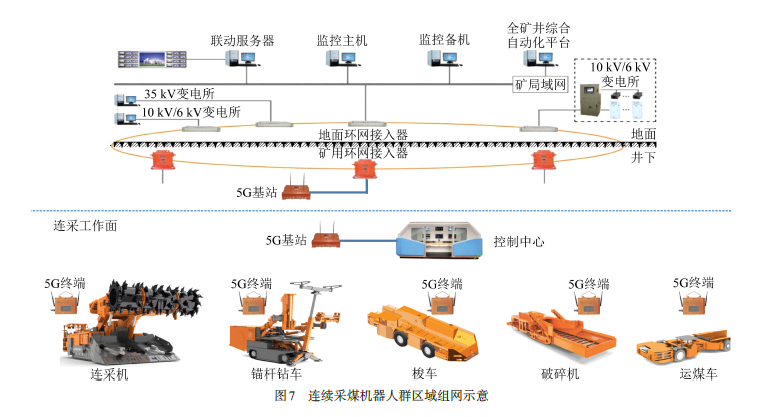
(1)利用井下5G高带宽、低时延的网络覆盖,增加井下矿用隔爆型中继转换器,将从BBU接收的数据下发到5G基站,实现了井下移动设备数据入网的高速传输。连续采煤机器人群区域组网示意如图7 所示。
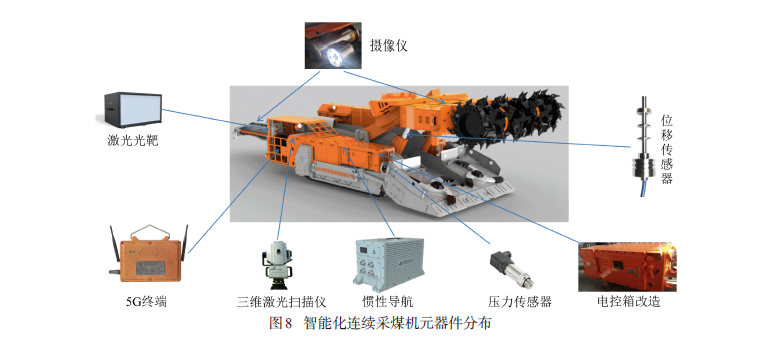
(2) 基于惯性导航关键技术实现了连续采煤机姿态控制,辅以激光导引和视觉识别等技术,实时修正累计误差,通过对3 个角度和3 个标定方向的控制,将连续采煤机控制在标准航线内;利用无线WiFi 技术实现了梭车与连续采煤机协同作业。负载敏感自适应技术可根据负载情况自主调节进刀深度、截割速度等参数,实现与现有采掘工艺完美契合。在连续采煤机身部署传感器元器件(图8),基于采高、振动、电流、视频等多传感器检测数据,运用合理算法辅助煤岩分界识别,进行顶底板控制,智能化连续采煤机自主掘进作业如图9 所示。

(3) 采用红外线信号控制原理,通过增设时间继电器实现了破碎机与梭车协同作业,利用无线通信技术实现了连续采煤机全方位跟机视频监控。
(4) 应用带式输送机空载可控停机原理和特点实现了带式输送机的可视化管理。掘进工作面带式输送机空载可视可控自动化管理系统成功将带式输送机运行过程中的“人、机、环、管”数据信息相融合。掘进工作面带式输送机远程集中控制界面如图10所示。
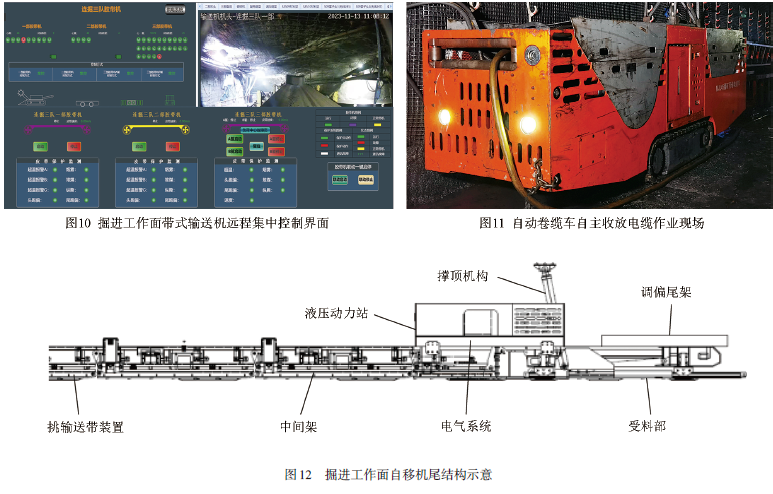
(5)履带式电缆卷放车与连续采煤机配套使用,可与连续采煤机通信交互,便于连续采煤机线缆的管理,实现了连续采煤机动力电缆的存储与自动收放。自动卷缆车自主收放电缆作业现场如图11 所示。
(6) 掘进工作面自移机尾由动力架、调偏尾架、中间架、迈步推移轨道、撑顶机构、挑输送带装置、液压系统、电气系统等组成,具备机械化调偏功能,能够在设备前移时调整设备推移方向。并能与现有破碎机、可伸缩带式输送机、带式转载机配套使用,具有自移功能。通过迈步推移机构,由油缸推移收缩实现架体的前行后退和迈步式快速自移,实现了带式输送机机尾的机械化延伸。采用手动先导和遥控方式操作,降低了作业劳动强度。掘进工作面自移机尾结构示意如图12 所示。
结 语
基于5G+连续采煤机器人群智能控制及自动化协同作业系统的应用,通过掘进工作面5G通信网络、集控中心协同连续采煤机智能化作业,地面分控中心协同井下分控中心作业,连续采煤机控制系统协同梭车智能化作业,配套自动卷缆车协同连续采煤机作业,连续采煤机定位定姿系统协同连续采煤机智能化作业技术手段,将作业人员从危险恶劣的环境中解放了出来,远离煤矿“五大灾害”,免受粉尘、噪声等职业病侵害,实现了远程自动割煤和工作面生产区域无人化,为传统掘进系统实现智能化积累了实践经验;连续采煤机全方位跟机视频监控使采煤机司机在生产过程中全方位、零死角、高清晰监控,可达到身临其境的感觉,保证了采煤机在生产中更智能、更高效、更安全地运行;带式输送机集中控制及空载可视可控管理减少了设备损坏和电耗,促进了掘进工作面不断向智能化安全高效发展。
- 相关推荐
