矿用卡车无人驾驶车载系统关键技术在西湾露天矿的应用
时间:2024-10-28 作者:邵津津 来源:智能矿山网 分享:露天矿山是我国矿产资源开采的一种重要形式,其生产效率和安全性对国家经济发展具有重要意义。矿用卡车作为露天矿山运输的核心设备,需求量逐年攀升,矿用卡车驾驶环境恶劣,驾驶员劳动强度大,安全问题日益突出。近年来,计算机科学、自动控制、传感器技术和通信技术等多个领域的研发应用,共同推动无人驾驶技术迈向新的里程碑,无人驾驶系统的研发与应用为传统矿山行业带来了前所未有的发展机遇,不仅能提高矿山运输效率,降低运营成本,还能有效减少因人为操作失误导致的安全事故,为矿山安全生产提供有力保障。
2020 年6 月,神延煤炭完成《智能矿山建设总体方案》制定并通过评审,建立以矿用卡车无人驾驶为基础,涵盖智能选煤厂、数字档案、生态建设、地面系统无人值守的智能矿山系统。如图1 所示,矿用卡车无人驾驶系统构建以无人运输作业智能管理系统为核心,深度融合矿用卡车无人驾驶车载系统(车载无人驾驶系统)、数据通信系统、协同作业管理系统,通过无人化、智能化设施和管理,全方位监控矿卡车辆运输状态,智能调度矿山日常作业,在保证矿用卡车运行安全的前提下,车辆自动循迹与动态绕障行驶、自动卸载、自动入铲与装载、自动驾驶等运输作业,且能与电铲、推土机、有人驾驶辅助车辆进行混合编组作业,实现矿卡运输的“装、运、卸”全流程无人驾驶作业。
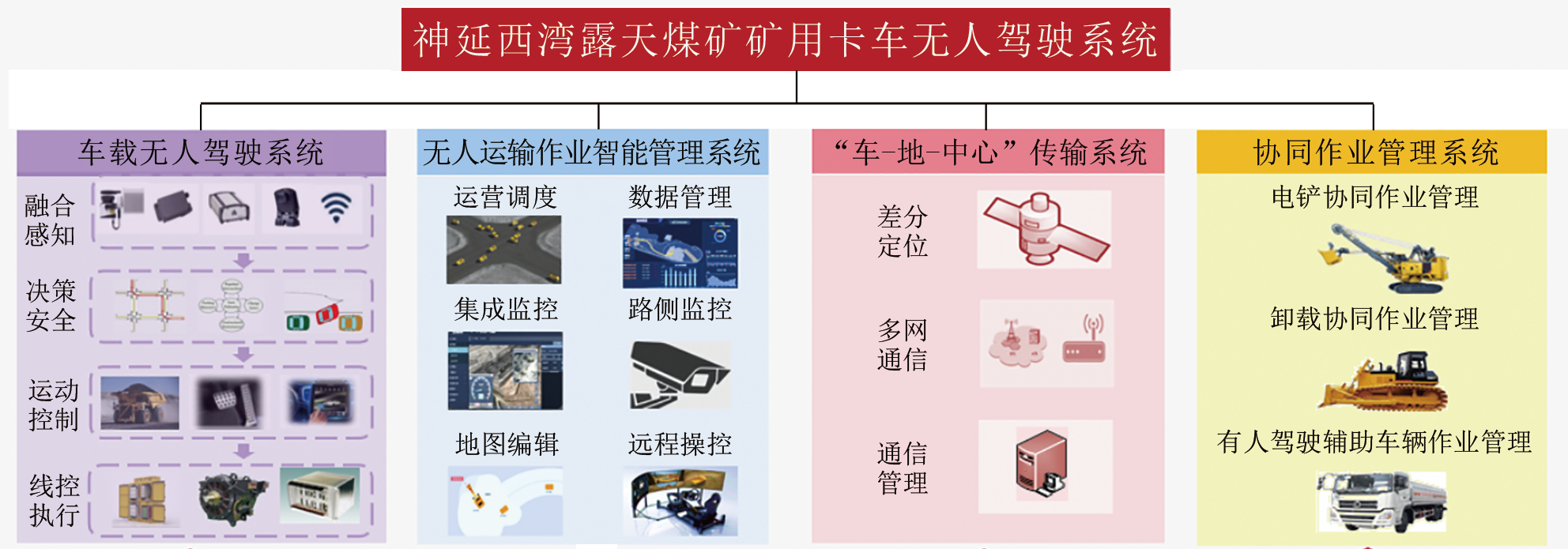
图1 无人驾驶系统总体组成
无人驾驶车载系统功能及构成
系统功能
矿用卡车无人驾驶车载系统从无人运输作业智能管理系统接收作业任务调度指令,根据车辆自身状态进行决策,并向车辆下达控制指令,驱动矿用自卸车执行作业任务。在执行任务过程中,无人驾驶车载系统通过车载传感器感知周围的地形和障碍物信息,与有人驾驶的其他车辆进行安全、高效的协同作业,并实时调整矿用自卸车的运行状态,以期安全、高效地完成作业任务。系统主要功能分为7 部分。
(1) 数据交换
车载无人驾驶系统通过数据接口与传感器和执行器进行数据交换。交互的数据接口包括:毫米波雷达、激光雷达、GNSS惯导设备、以太网摄像头、以太网无线通信设备、矿用自卸车车身控制器、矿用自卸车转向/制动/油门控制器。
(2) 传感器数据预处理
主要指对毫米波雷达和激光雷达的原始数据进行必要预处理,以减轻后续软件节点的计算负担,预处理主要包括数据坐标转换和噪点滤除。
(3) 障碍物识别
车载无人驾驶系统基于预处理后的传感器数据,先进行基于毫米波雷达的单传感器障碍物识别和基于激光雷达的单传感器障碍物识别,然后将二者融合进行障碍物信息校验和跟踪。
(4) 智能决策
车载无人驾驶系统结合地面调度任务、环境感知结果和矿用自卸车当前状态,完成车载无人驾驶系统软件节点状态维护、任务状态维护、行驶决策、装载决策、卸载决策、停车决策和故障决策等。
(5) 运动控制
车载无人驾驶系统需要在对矿用自卸车进行纵横向动力学解算的基础上完成路径跟踪和车速控制,以跟随智能决策功能所给出的期望轨迹。
(6) 故障诊断
车载无人驾驶系统通过分析数据诊断传感器故障、执行器故障、车载无人驾驶系统故障和矿用自卸车故障。
(7) 数据存储
车载无人驾驶系统存储必要数据,如传感器原始数据、算法计算中间数据等,以便进行事故分析和后期大数据挖掘。
系统构成
根据上文对无人驾驶车载系统功能特点分析,矿用卡车无人驾驶车载系统根据功能分为感知定位模块、决策规划模块、运动控制模块和线控执行4个模块,如图2 所示。

图2 矿用卡车无人驾驶车载系统架构
(1) 线控执行模块
线控执行模块主要是对徐工XDE240 矿用自卸车进行线控改造,线控改造后的功能拓扑如图3 所示,主要涉及转向系统、驱动系统、制动系统、货箱举升系统、车辆状态采集系统、行车警示系统等。
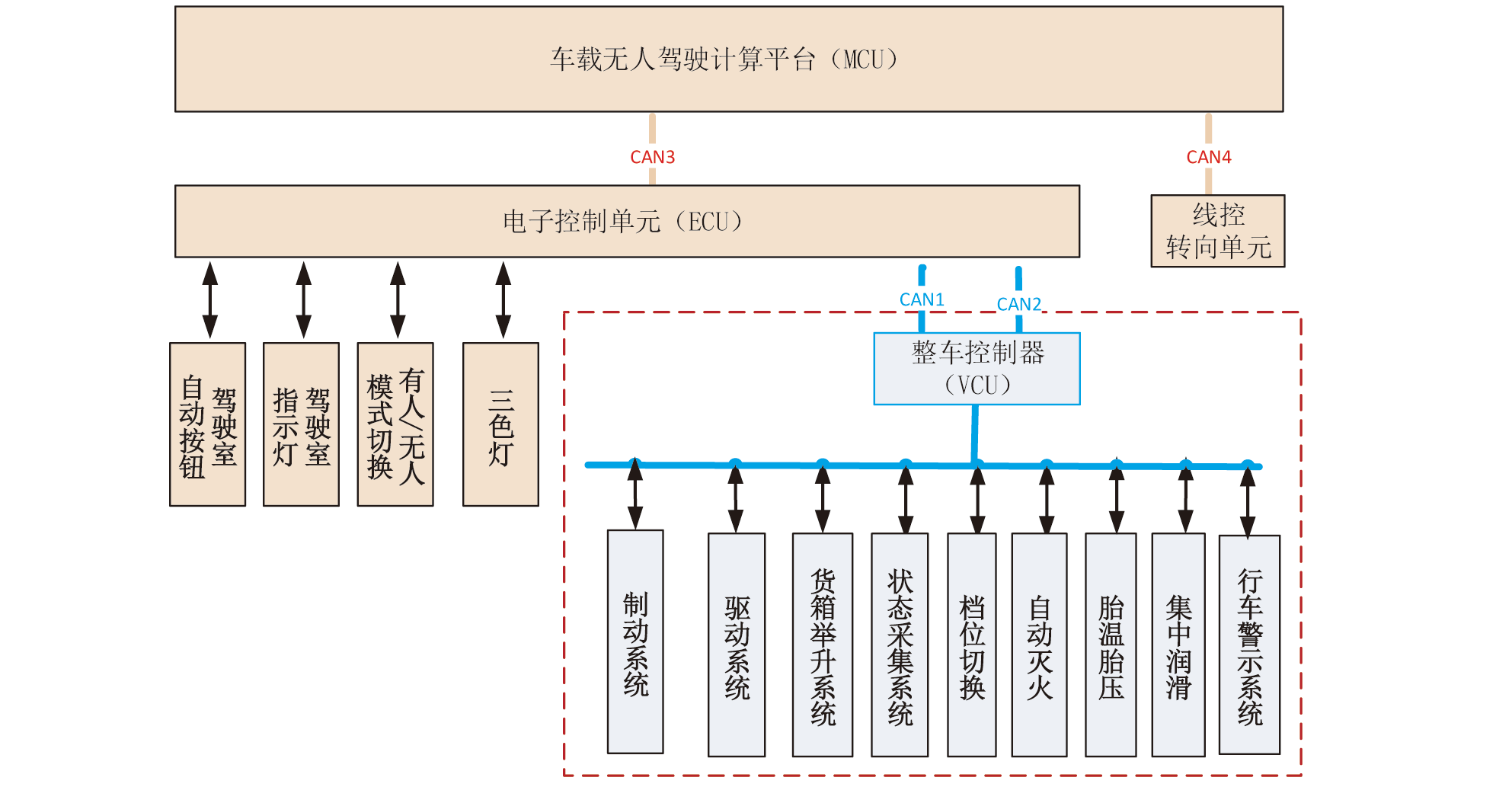
图3 矿用卡车无人驾驶车载线控改造
通过线控改造,所有灯开关、油门踏板、档位手柄、举升、制动系统、转向、自动灭火、胎温胎压、集中润滑、发动机、电驱动、原车故障等信息通过CAN总线接入电子控制单元(ECU),实现车辆各系统的集成控制、优化车辆的运行状态、故障自诊断和保护,提升车辆的整体性能和安全性。
(2) 感知定位模块
感知定位通过多维传感器实现环境感知和车辆定位如图4 所示。环境感知主要实现对障碍物检测
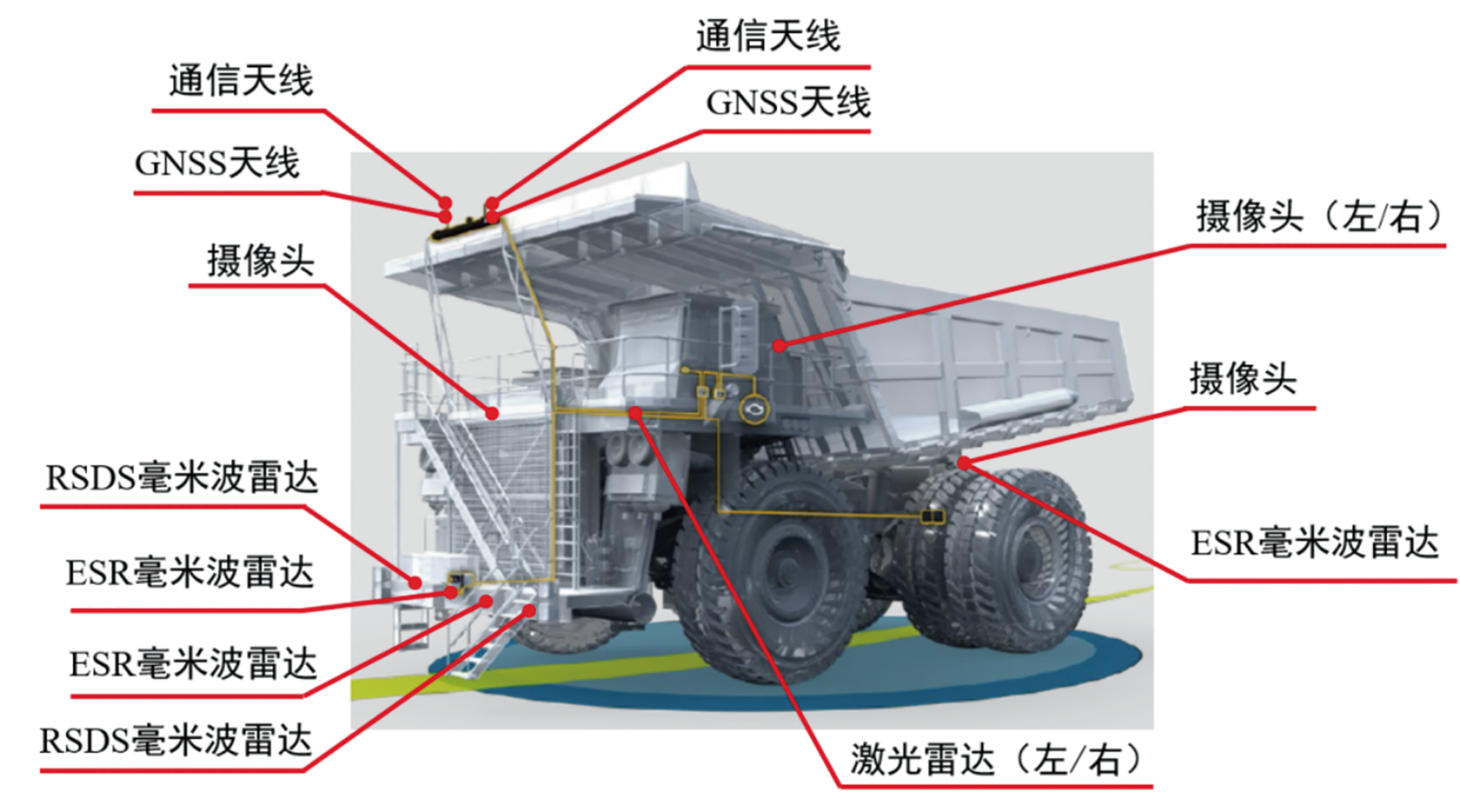
图4 矿用卡车无人驾驶车载传感器布局
识别和跟踪预测;在矿区复杂环境中,为了保障无人驾驶矿用卡车能够安全运行,感知模块满足矿区粉尘、雨雪雾、剧烈震动和极端低温等恶劣工况的使用需求,能够对道路、落石、凹坑、挡墙、车辆、行人等障碍物进行准确感知识别,获取障碍物的位置、速度、航向角、种类、尺寸、边缘轮廓点等信息。定位采用卫星导航、惯性导航模式和多传感器融合导航模式,为矿用卡车提供准确位置和姿态。
(3) 决策规划模块
决策规划模块是车载系统与无人运输作业智能管理系统信息交互的接口,接收作业调度指令并根据车辆自身状态实现运行决策,并将控制指令发送给车辆控制软件,驱动矿用卡车执行作业任务,同时兼具车辆执行作业任务过程中的安全防护。车载决策规划模块系统架构功能如图5 所示,主要包括驾驶模式决策、任务模式状态机流转功能、碰撞预警与防护功能、局部路径规划功能、速度规划功能、故障分级与安全导向功能、数据记录管理、车载通信功能8 大功能模块。
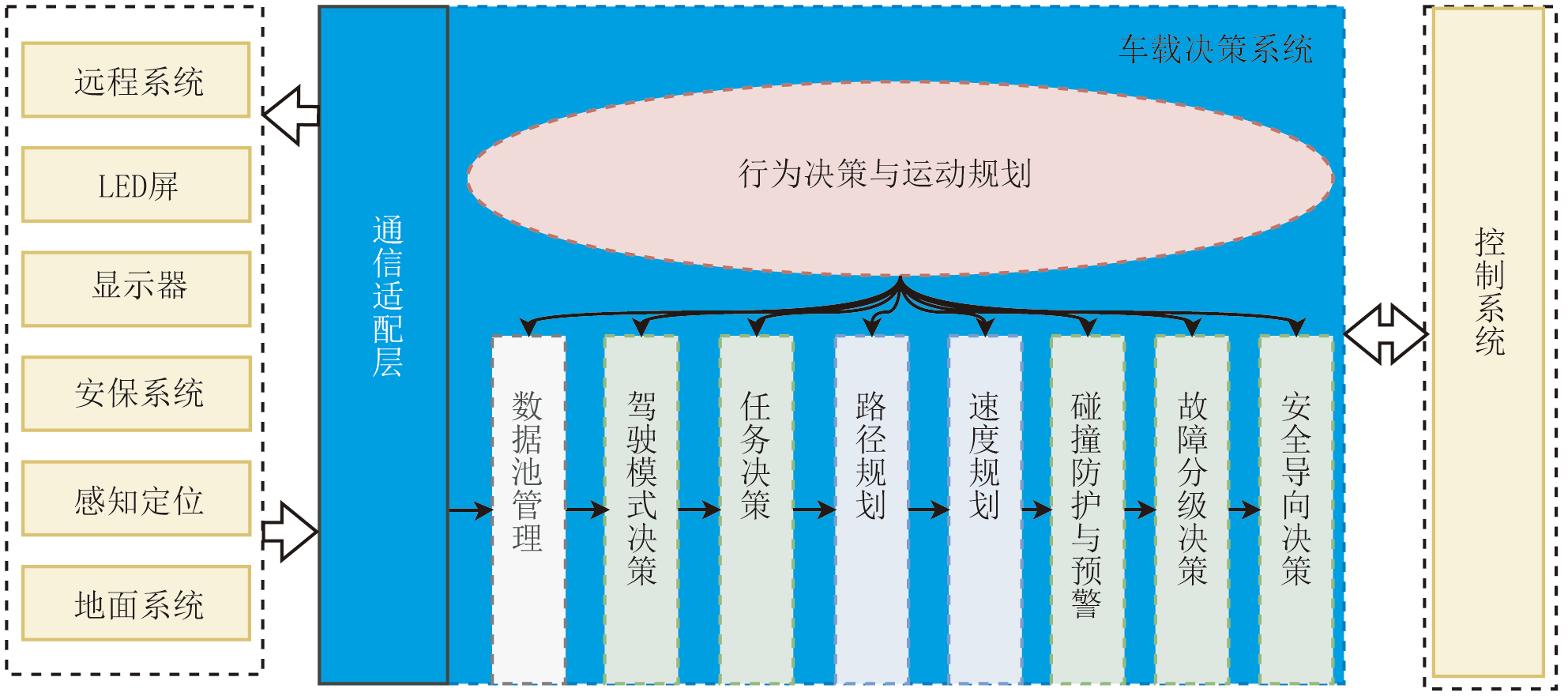
图5 车载决策系统架构
(4) 运动控制模块
车辆控制根据决策层选定的期望路径及速度和其余电气信号,执行相应驾驶行为。车辆控制主要包含路径跟踪、车速控制和其余执行器控制。路径跟踪根据车辆当前时刻位姿及参考路径,确定下一时刻期望转向角,实现横向误差的非线性反馈控制。车辆纵向控制根据车辆当前时刻速度和加速度及期望速度,确定下一时刻期望加速度,并通过下位控制器,完成对车辆电控油门、电控制动系统执行器的精准控制;其余执行器控制包含车厢举升和下降控制、灯光控制、装载制动控制、驻车制动控制、指示灯控制等。
关键技术及应用
无损且安全增强的线控改造技术
线控改造结合车辆执行系统原理,改造后徐工XDE240 矿用自卸车如图6 所示,基于可靠性与安全性设计理论,制定并实现了整车转向、液压、电气系统3 大方面无损且安全增强的线控改造。

图6 线控改造后徐工XDE240 矿用自卸车
(1) 转向系统方面
采用了国际上最成熟可靠的线控套装,转向控制器获得SIL2 安全等级认证,通过自主化深度调校,实现了高精度、高稳定、高可靠的转向执行控制,转向角度误差小于0.5°,反馈周期最小为25 ms。
(2) 液压系统方面
对制动系统改造需保证人机双通道独立控制,还增加了反向电比例阀与紧急制动阀,增强制动冗余备份并提供极端失电制动能力,提升制动可用性与安全性;对举升系统改造增加举升角度传感器与原来的上下限位开关形成状态反馈冗余,举升角度误差小于0.5°,反馈周期最小为50 ms。
(3) 电气系统方面
增加辅助控制器与无人驾驶车载主控器成冗余备份,通过车辆总线实现发动机、电驱动、辅助控制、警示等系统部件的全面控制接入与状态接收;同时设计了从无人驾驶主控制器、辅助驾驶控制器、整车控制器的3 层检测与安全控制机制,每个控制器都具备独立控制车辆安全停车的能力,实现充分安全冗余。
多源信息多层次融合感知技术
针对矿区环境下的非铺装路面凹凸不平、障碍物种类多、运动随机性较大、灰尘遮挡误报导致障碍物漏报等问题,设计了一种新的融合策略以提升多源传感融合算法在矿区环境下的适应性和鲁棒性。
在多源传感器的融合过程中,存在多个传感器的多个目标测量值,在进行目标状态融合之前,需明确不同传感器所对应的相同目标测量值,关联不同传感器测量值。系统感知单元基于最近邻算法进行不同传感器间的数据关联,如图7 所示,蓝色小矩形代表传感器1 检测到的目标,黄色小矩形代表传感器2 检测到的目标,虚线椭圆框表示目标的关联门,传感器1 的检测目标O1,3 与进入关联门内的测量进行关联,d3,2 表示传感器1 检测的目标3 与传感器2 检测的目标2 的欧式距离,同理d3,3 表示传感器1 检测的目标3 与传感器2 检测的目标3 的欧式距离。最近邻算法计算出2 个传感器的每个检测目标之间的欧式距离后,选取距离最近的2 个目标为关联上的目标对,确定不同传感器检测目标间的距离。
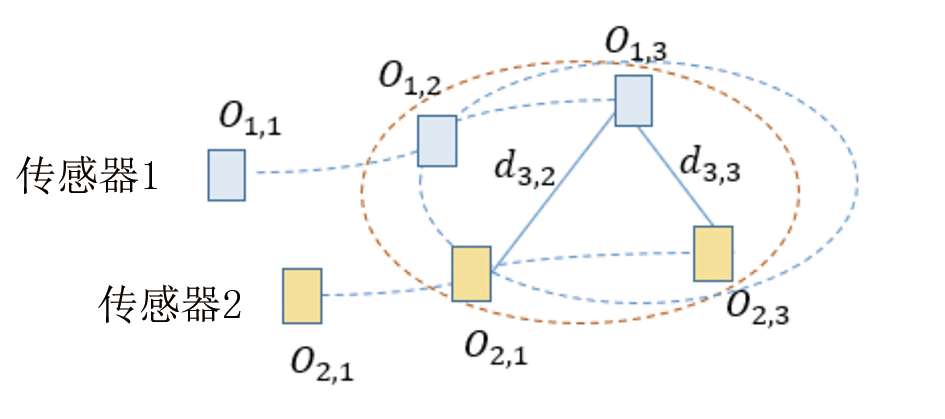
图7 最近邻关联示意
露天矿山实际作业场景验证多源传感器融合检测效果如图8所示。
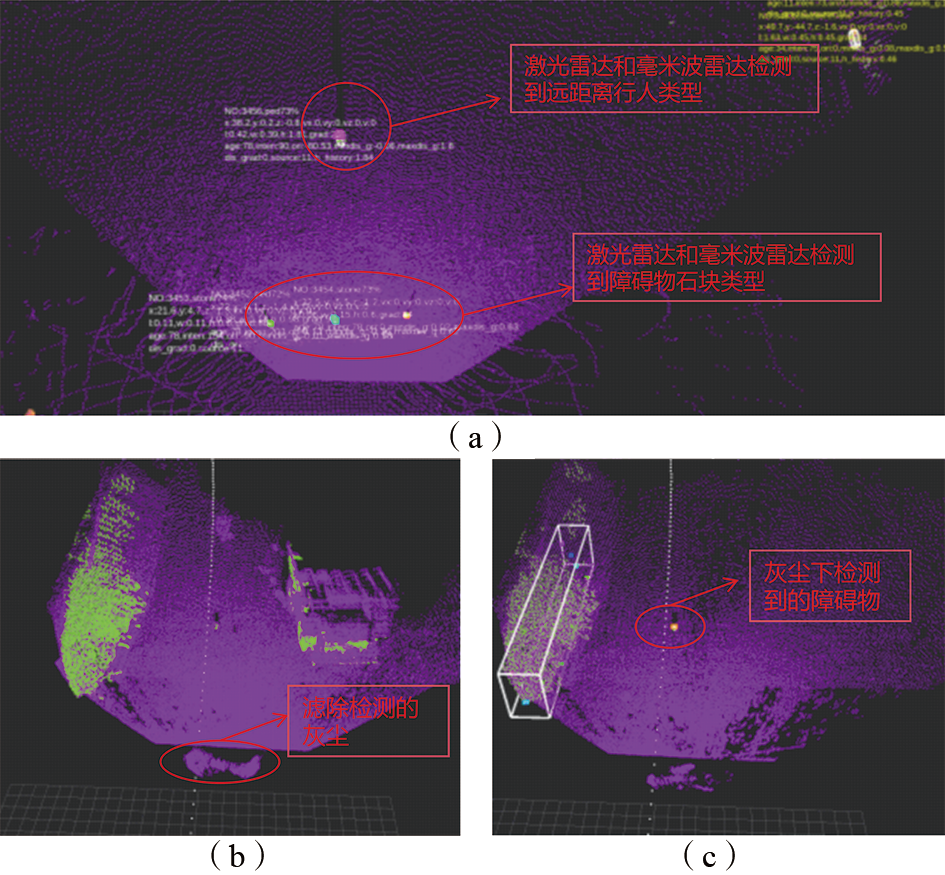
图8 露天矿山场景多源传感器融合检测效果
在无灰尘情况下,融合算法根据激光雷达和毫米波雷达的感知结果和跟踪稳定性结果,采用模糊逻辑方法判断选择输出目标如图8a 所示,对车前方大尺寸的物体需要激光雷达和毫米波雷达同时感知输出,小尺寸的物体需要激光雷达稳定跟踪多帧后输出。
在较高浓度的灰尘情况下,融合算法会自适应调整激光雷达和毫米波雷达的障碍物输出置信度,毫米波雷达透过灰尘输出感知结果如图8b 所示,为露天矿山常见扬尘场景,灰尘能够有效反射激光雷达点云,导致误触发碰撞停车。
利用毫米波雷达对灰尘不敏感的特性,将车辆前方安装的多个毫米波雷达返回点云进行聚类,将聚类结果与激光雷达感知结果进行融合,实现在不同环境下各类障碍物特别是极小障碍物的感知,如图8c所示。
多模差分GNSS+高精度IMU 的组合惯导应用技术
为保障运输车辆在矿区复杂环境高效运行时实时精准位置与位姿信息,提高作业安全性和效率。采用多模全球导航卫星系统(GNSS),支持北斗、GPS、格洛纳斯等主流全球导航定位系统,并根据信源强度主动切换卫星定位来源,实现卫星定位的最大可用性,采样差分GNSS 技术,提供更高的定位精度,确保矿卡在采矿场景中准确跟踪位置。
系统集成惯性传感器(IMU), 通过整合GNSS、RTK和IMU,在GNSS信号弱或中断的情况下,通过高精度惯性推算依旧能保持短时间的高精度定位定向,实现最大化综合可用性,实现高可靠和高可用的RTK定位精度水平,实现全矿运输作业车辆包括电铲、轮推、平地机、洒水车、装载机、指挥车等车辆定位、测速,为智能调度、路径规划等功能模块提供基础服务。
非结构化道路的局部路径规划技术
矿山运输道路属于非铺装路径,路面颠簸,容易撒落,无人驾驶卡车运行路径会存在石块等类型障碍物,导致车辆停车或压块风险等问题。通过结合矿山运输特殊的交通规则(车辆左行规则、车辆让行规则等) 与不同场景(巡航场景、装载场景、卸载场景),保障生成符合安全、高效的绕障轨迹,是无人驾驶技术中的难题。
针对高速、石头探测距近、车地传输延迟导致绕障停车问题,设计车载端的最优控制路径规划算法,解决巡航阶段最高车速25 km/h、感知30 m探测距离的极限工况下的绕、跨障规划问题。针对绕障过程中的安全防护、效率低问题,采用拟人行为决策根据多条绕障路径进行代价筛选,优先跨障、次优左侧绕行、再次右侧绕行的避障路径规划如图9 所示。
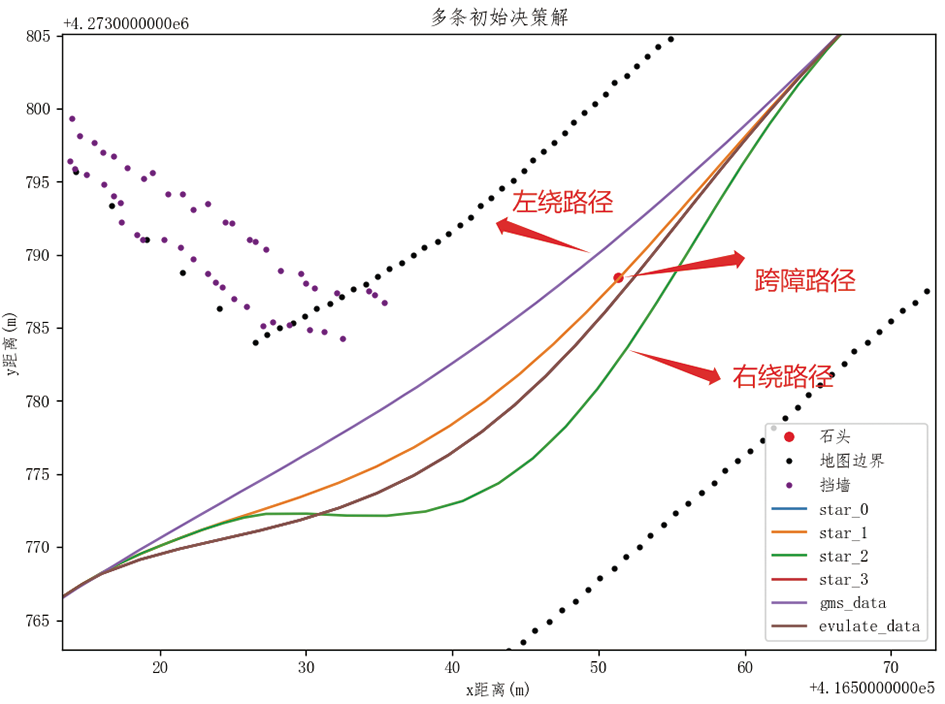
图9 矿区场景下避障局部规划效果
针对物料溢出和落石导致装卸载起步误差较大、需要停车换点侧移问题,提出车载端的起步带曲率、侧移与跨障规划方法,降低流程打断概率,提升装卸载效率。针对挡墙形态各异导致规则方法对边缘场景无法处理问题,提出一种考虑角度调整偏差、侧移偏差、跨障因素、几何面积的多目标代价优化方法求解最优卸载点,以纵向加加速度、横向角加速度、时间、参考路径吸引的多目标优化局部路径规划。如图10 所示场景针对卸载位置存在石块问题,多目标优化方法生成最优终点,规划模块基于上述起终点生成避障路径,路径生成时间小于20 ms,现场实车测试表明较原方案减少重新提车次数,极大提升装卸载效率。
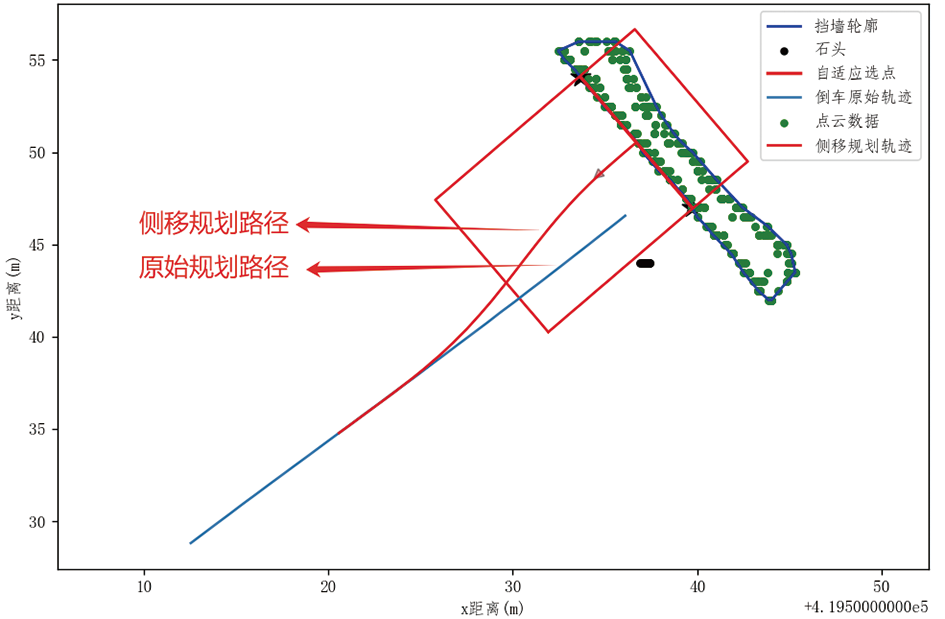
图10 装卸载场景下局部规划效果
非铺装路面大惯性车辆横纵向控制技术
矿区非铺装且常富水带来的坑洼、起伏、侧倾等随机不平且不易探测的路面,以及大吨位矿卡执行器响应时滞性显著且存在时变的特点,无人驾驶车辆高精度循迹跟踪控制是无人驾驶技术难点之一。如图11 所示为系统车辆循迹过程使用的横向控制算法,主要包括前轮反馈控制算法、后轮反馈控制算法。
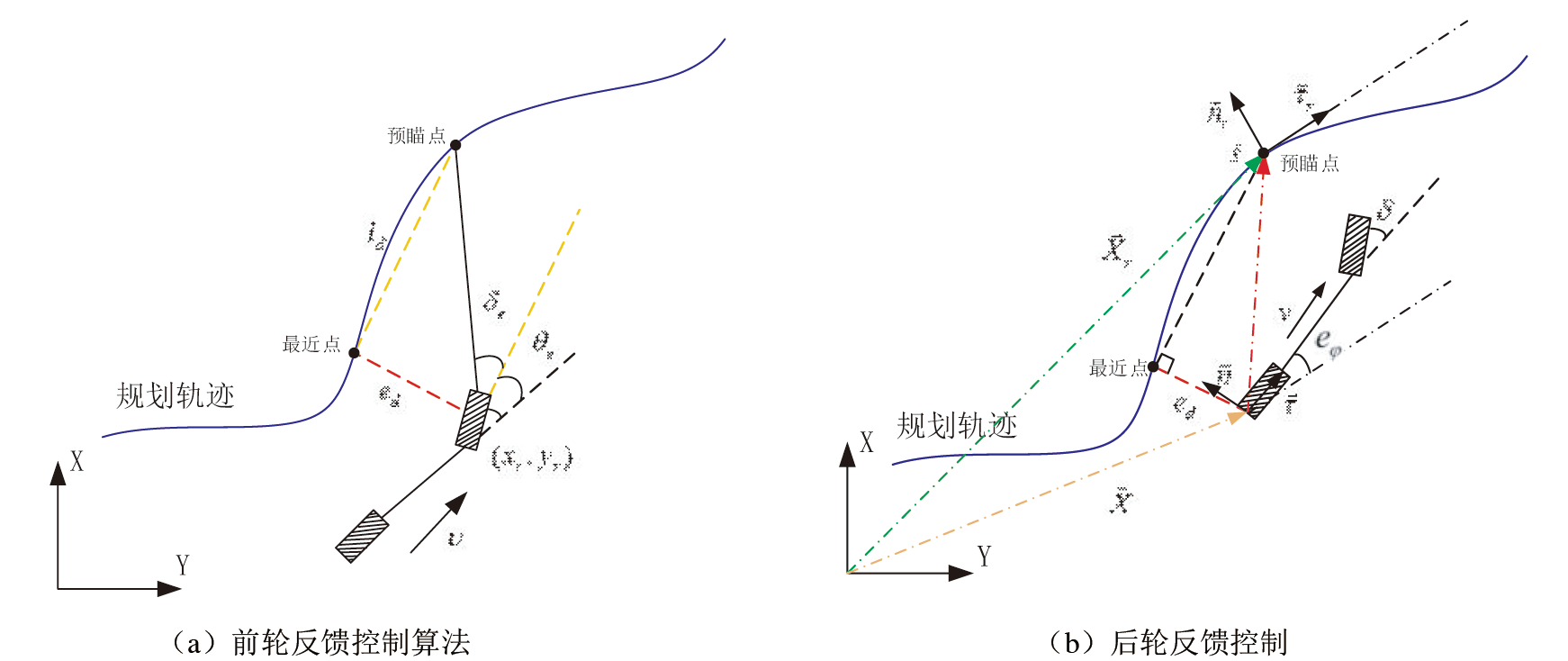
图11 前、后轮反馈控制算法跟踪
(1) 横向循迹控制
融合状态预测、基于几何追踪的高效求解运动控制器及基于模型预测控制的最优化运动控制器,针对不同行驶路径采用最合适的控制率,保证高速行驶、高机动行驶、高精度停车等多样化场景下的高鲁棒性、准确循迹。
(2) 纵向(速度) 控制
融合纵向路面行驶特征自辨识技术、采用基于质量与坡度补偿的分层PID 控制,在不同速度、不同路面情况下实现自适应参数调整,实现复杂路面下优异的通过性控制、平整路面下的速度平稳、准确控制。
通过横纵向控制器的协同配合,实现矿区复杂路面环境下的全速域(0~30 kmh) 安全、准确行驶跟踪与精确停车,横向误差小于0.3 m,速度误差小于2 km/h,泊车位置误差小于0.3 m,位姿误差小于1°,具体如图12 所示。
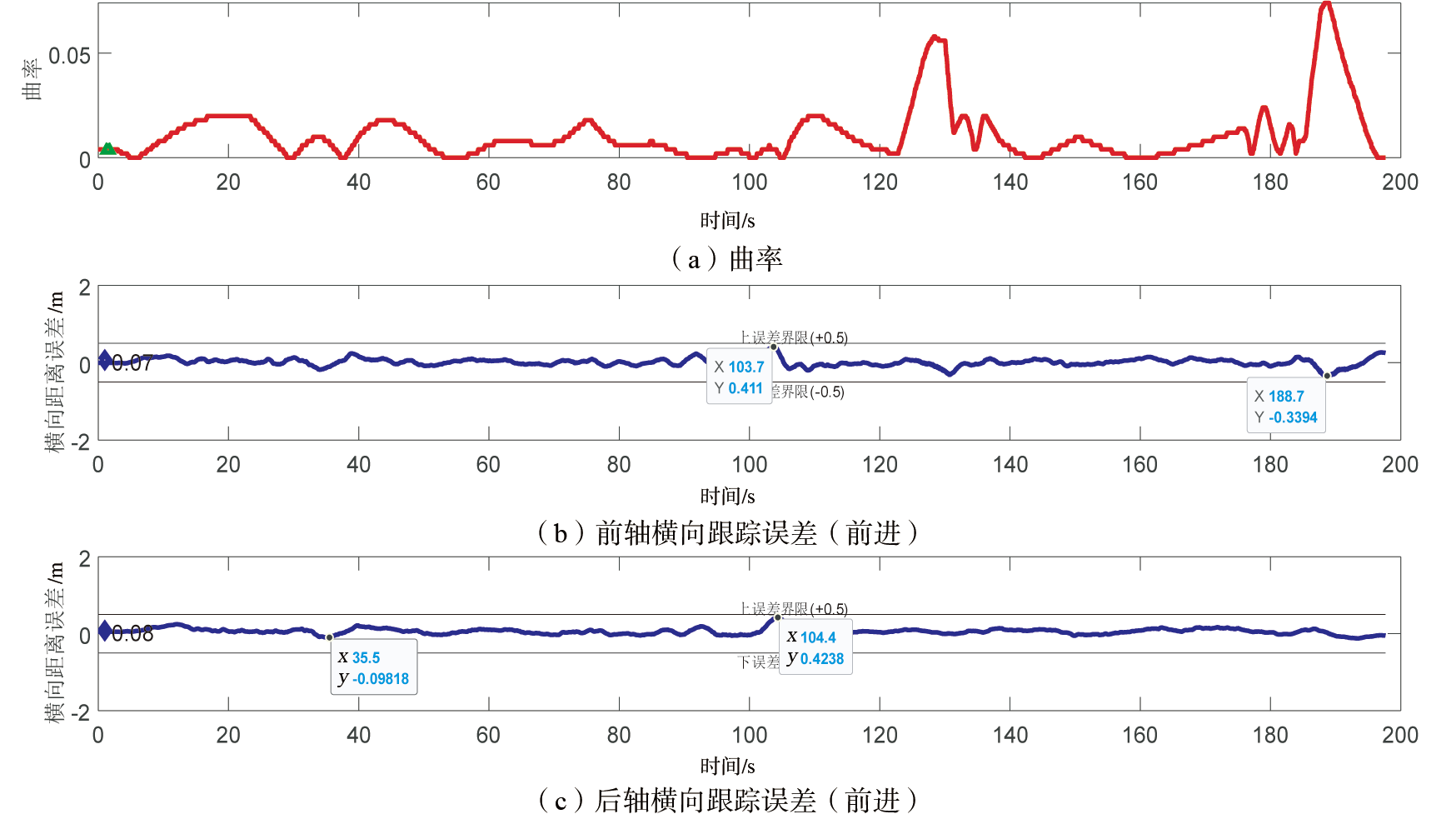
图12 崎岖道路下车辆跟踪效果
应用效果及推广前景
西湾露天煤矿无人驾驶项目通过提高重载车辆智能驾驶和调度技术,显著降低了重载车辆行驶能耗和排放。无人驾驶车载系统从总体方案、硬件配置、环境特点等多方面进行优化,基于任务指令、当前车辆状态和环境感知信息进行导向安全的决策,通过CAN通信向车辆执行器发送电控指令以驱动矿用自卸车完成无人运输,实现了运行过程中周边环境精确感知,遇障碍物无人驾驶车辆自动骑跨或绕行,存在碰撞安全风险时车辆自动刹停等功能,整个运输过程中车辆运行正常。
现场连续30 个月无人驾驶工业化考核,累计运行里程超27 万km,岩石运输量880 万m³,煤炭运输量超10 万t,无人驾驶安全生产作业零事故;此外3 编组15 台矿卡安全员下车,是国内单矿坑大吨位矿卡数量最大的无安全员值守运岩运煤混合编组集群无人驾驶项目,在本项目无人驾驶车载系统成果物的基础上,主要为3 个方向的拓展应用。
(1) 西湾露天煤矿无人驾驶项目,在矿用自卸车无人驾驶车载系统所采用的线控改造技术适应性调整后,成功为其他矿用车辆如推土机、洒水车、铲运车、电铲智能化改造提供技术基础,进而为实现整个矿山采、运、排作业的少人化、无人化提供基础。
(2) 在矿区复杂环境中感知定位技术应用,保障无人驾驶矿用卡车安全运行,在矿山类似特定场景下边坡检测、生产计划管理中发挥作用。通过建立精确可靠地图,矿区可更好的对边坡、挡墙等风险进行识别预警,有效开展管理生产计划,并提高整体生产效率。
(3) 矿用自卸车无人驾驶技术适用于横向领域的扩展应用,可在各类固定工作区域移动式运输系统、搬运系统等作为运行控制系统使用,如码头AGV运输、大型仓库搬运车辆/叉车等运输作业车辆。通过故障导向安全决策技术、安全路径规划技术、运动协调控制技术,提升车辆在复杂恶劣环境下运输作业安全性,保障生产安全。
通过矿用自卸车无人驾驶车载系统验证,可降低车辆行驶能耗和排放,提升车辆运输系统作业效率,相关技术的推广应用可带来显著的生态效益,为国家节能减排作出贡献,促进生态社会的构建。
结 语
矿用自卸车车载无人驾驶技术作为矿山工程装备自动化的关键技术,处于智能化、数字化、网联化为核心的现代装备制造最前沿,是未来工业互联的发展方向之一。
通过开展矿用自卸车无人驾驶系统研究与应用,有效的响应国家“四个革命、一个合作” 能源安全新战略,可充分利用其优势提高露天矿的生产装备自动化水平,提升安全生产水平,扩大经济效益与社会效益,提高企业的品牌价值,促进矿山开采工艺高质量发展。
策划:赵瑞 编辑:李雅楠
- 相关推荐
