多场景矿用轮式巡检机器人
时间:2023-11-30 作者:杨闯,闫晓刚,王建理 来源:智能矿山网 分享:
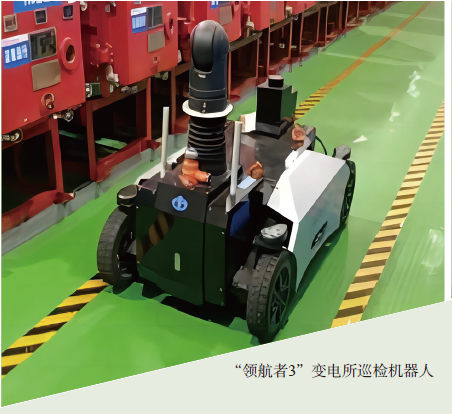
基于变电所、水泵房等煤矿井下多场景巡检需求,中煤科工机器人科技有限公司研制出了基于四轮与六轮移动底盘的多款轮式煤矿巡检机器人,其中“领航者3”全国量产化变电所巡检机器人已应用于国能亿利能源有限责任公司黄玉川煤矿。
轮式煤矿巡检机器人主要由机器人和充电装置组成。机器人自身集成核心控制器、传感检测、电源供给及数据网络传输等硬件结构,控制器依据巡检场景任务需求控制机器人运动方式、采集环境信息、上位机数据通信等,通过搭载多种矿用传感器实现巡检环境的智能感知;自主行走可采用多种导航方式,如二维码导航、激光雷达导航及视觉导航等,能够完成复杂环境下机器人的精准定位与高效行走;充电装置是巡检机器人必备要素,当机器人自身电量低于设定值时,可以自动巡航返回充电位置处,实现能源补充。
轮式煤矿巡检机器人具有自主导航(自主构建地图、规划巡检路径)、图像识别(设备标牌信息、指示灯状态、仪表示数、开关状态、人员情况等)、环境监测(实时监测设备可视部分温度、巡检环境的温湿度、烟雾浓度、气体浓度等信息)、双向对讲等功能,防爆等级为I类防爆,行走速度0~1 m/s,定位精度±10 mm,爬坡能力≤15°,可升降云台可实现不同层次空间目标物巡检。
关键技术与创新性
轮式巡检机器人结合煤矿机器人防爆安全设计理论及方法,在满足防爆要求的基础上具备扫拖一体化作业功能。同时,视觉相机、雷达、语音交互系统等关键元部件及系统全部国产化,多类型自适应移动底盘、移动状态下的精准建图及友好的人机交互体验是该产品的技术创新点,且创下多个国内首次。
(1)双差速自稳定移动底盘结构
为提高机器人的越障能力,创新研制出双差速驱动轮配合四承重万向轮移动底盘结构。轮系结构采用后万向轮固定安装,前万向轮为摇摆桥结构,可绕中间转轴左右摇摆;驱动轮及独立驱动组件安装于底盘两侧中间位置,为整车提供驱动;摇摆桥结构和驱动轮均设置有减震系统,提高了机器人在复杂地面的适应性。

(2)全向移动六轮式移动底盘结构
基于阿克曼运动原理,研制出以隔爆箱作为底盘车架的六轮式移动结构。防爆箱作为底盘大架,外设悬架总成,采用万向节传动将动力传递至轮组总成实现行走。六轮组均采用摇臂式减震系统,配置独立的避震器,以适应矿井复杂地形,其中前后4个车轮具有驱动电机以及双向转向能力,4个驱动轮及4个转向系统均为独立电机电控系统,在VCU(车辆控制器)的控制下,使得机器人六轮移动底盘可以实现前后阿克曼小半径转向行驶、蛇形连续机动、原地转向等多种行驶模式。
(3)基于混合地图的层次化SLAM技术
创造性地提出了一种基于混合地图的SLAM实现方法,采用编码器、IMU和激光传感器数据融合处理,解析、预测、更新机器人位姿和位置,实时创建不同环境的场景地图,实现了煤矿井下复杂环境的精准定位,提高了环境描述适用性,降低了算法计算复杂度。
(4)基于阵列增强的随动式语音交互技术
针对巡查人员面临数据信息获取途径单一、人机交互性差等问题,提出一种基于阵列增强的随动式语音交互系统,以煤矿巡检机器人为实现平台,采用语音识别、语音合成和阵列增强等手段将语音与文本实现相互转换,完成人机交互方式从单一到多种方式融合。
推广应用
中煤科工机器人公司研制的多款轮式巡检机器人已在神东矿区、榆神矿区等多个煤矿现场进行应用。其中,在黄玉川煤矿井下变电所采用“领航者3”轮式机器人代替人工巡检,解决了人工劳动强度大、固定点监测覆盖不全面等问题,实现了巡检应用场景的智能化感知。应用煤矿从固定人员巡检改为无人值守,实现巡检人员减少50%以上,巡检效率、故障预警准确率均提升50%以上,为变电所无人化巡检提供了有力支撑,逐步成为国家智能矿山建设的新方向。
- 相关推荐
