基于UWB 技术的采煤机定位系统
时间:2023-11-30 作者:谢巧军,蒙昱璋 来源:智能矿山网 分享:采煤机精确定位是煤矿智能开采的重要环节,目前,采煤机定位主要基于惯性导航系统(简称惯导系统) 来实时获取采煤机的位置信息。然而,随着惯导系统的长时间使用,其累积误差不断增大,导致采煤机定位不准确,需要定期进行校准。笔者提出了一种基于UWB技术的采煤机定位系统(简称采煤机UWB定位系统),采用定位系统结合原有惯导系统的采煤机动态定位方法,不仅具备惯导系统的自主定位特性,同时可解决单一惯导系统因累计误差大而失准的问题,从而适应煤矿工作面复杂工况,可实现高精度采煤机位姿定位。UWB技术具有厘米级的定位精度,通过UWB无线通信的TDOA定位算法来确定采煤机的精确位置。采煤机UWB定位系统具有定位精度高、抗干扰能力强等优点。
采煤机UWB 定位计算方法
UWB(Ultra Wide Band,超宽带) 技术是一种无线通信技术,其特点是信号带宽非常大,具有高精度、高速率、低功耗、抗干扰强等优势,时间域分辨率非常高,可以实现厘米级的定位精度。
常用的UWB无线定位算法有基于UWB无线信号接收强度的RSSI (Received Signal StrengthIndication) 定位算法、基于UWB无线信号到达角度的AOA(Angle of Arrival) 定位算法、基于UWB无线信号到达时间的TOA(Time of Arrival) 的定位算法和基于UWB 无线信号到达时间差的TDOA(Time Difference of Arrival) 定位算法。
RSSI 算法无法有效地利用UWB的高带宽优点,易受干扰,定位精度差;AOA算法则需要传感器之间的大量合作, 并且会受到累积误差的影响;TDOA算法的优势首先在于一次定位的通信次数显著减少,其次是因其采用时间差而非绝对时间进行测距,其精度也比TOA高。因此,采煤机UWB定位系统采用TDOA定位算法。
TDOA定位算法的基本原理是先测得移动目标信号到每个已知基站之间的到达时间差,再乘以电磁波传播速度得到距离差,利用距离差构建双曲线方程,具体过程:首先选定一个基站作为参考,然后以参考基站和其他基站为焦点,利用待测移动目标到这2 基站之间的距离差建立双曲线方程,多条双曲线的交点可得到待测移动目标的位置坐标。
采煤机UWB 定位系统硬件设计
采煤机UWB定位系统主要由定位标签卡、定位读卡基站、地面上位机定位系统组成。采煤机UWB定位系统结构如图1 所示。
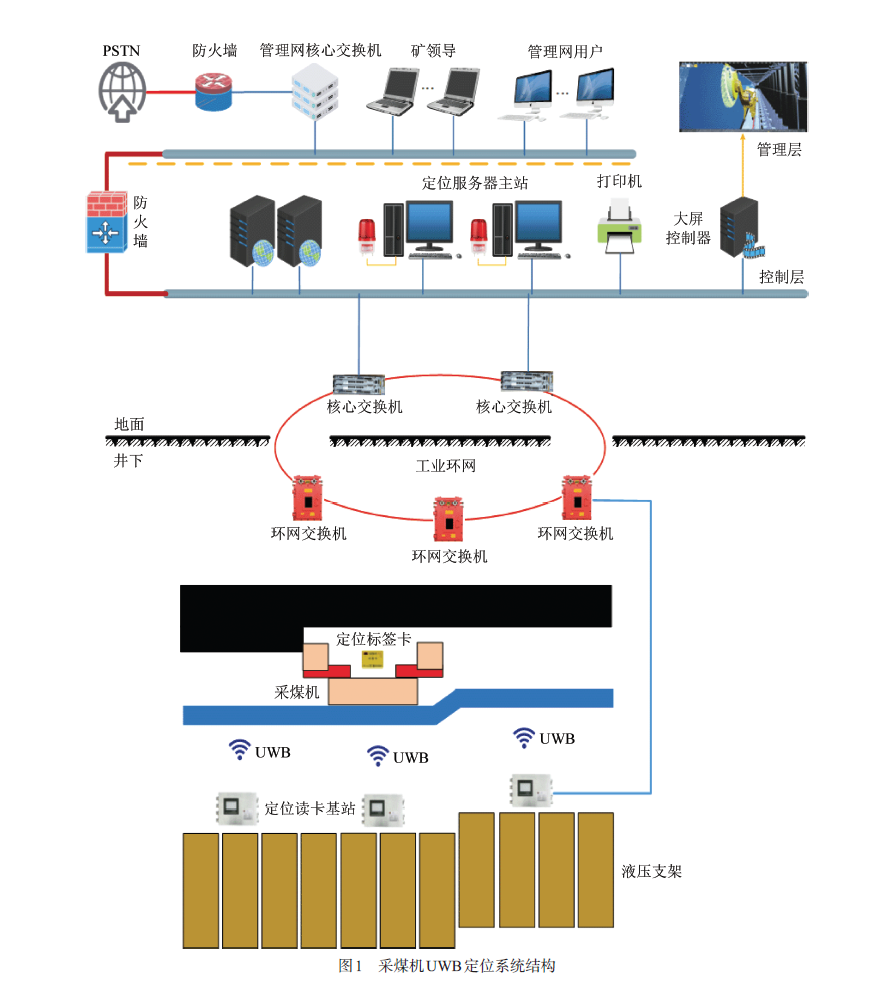
定位标签卡安装于采煤机上,定期发送带有时间戳的请求测距信号。读卡基站安装于液压支架上,每8 架安装1 台。读卡基站接收定位标签卡的请求测距报文后,记录UWB报文的接收时间并进行测距计算,通过以太网将时间戳及距离信息上传到采煤机定位系统的采集软件,按照TDOA算法实时计算采煤机的精确位置。
定位标签卡硬件设计
定位标签卡主要由电源管理模块、UWB信号无线收发模块、主控单片机、存储模块、声光报警模块等组成。
由于采煤机的运行速度比较低,通常不高于20 m/min , 因此定位标签卡不需要频繁地发送请求测距报文, 采煤机UWB 定位系统将定位标签卡的请求测距报文发送频率设定为1 次/s , 即可完全满足现场实际应用要求。根据计算, 一节3.7 V/8 000 mA· h 的锰酸锂电池可以保证定位标签卡至少工作1 年。
(1) 电源管理模块
定位标签卡由锂电池供电,电源管理模块实现了将锂电池电压经低压差线性稳压器降压到+3.3 V及+1.8 V,并向主控ARM、UWB信号无线收发等各模块供电,还可对锂电池进行充电管理,实时检测锂电池的电压以及剩余电量,用于定位标签卡的欠压报警。
(2)UWB信号无线收发模块
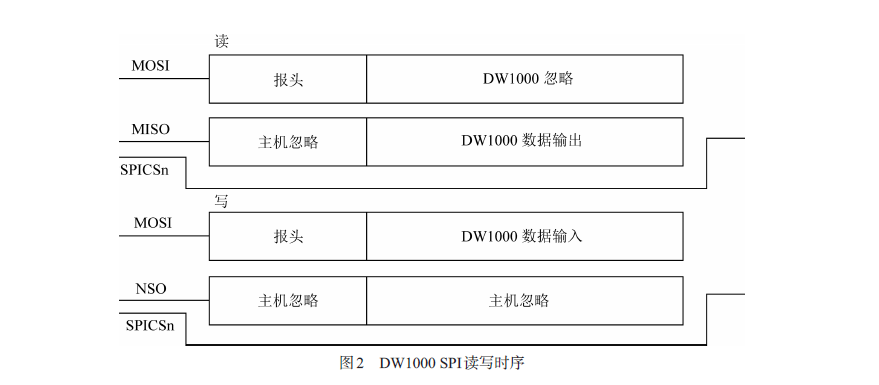
UWB 信号收发功能由DW1000 芯片实现,DW1000 通过SPI 总线与主控单片机进行通信,DW1000 SPI 读写时序如图2 所示。

为增强UWB信号的抗干扰能力并延长其无线传输距离,需要增强其射频发射功率。UWB中的RF 射频信号经过巴伦转换器后再送至收发转换开关,然后再进行放大,可实现功耗与发射功率的良好平衡(图3)。
(3) 主控单片机
出于低功耗考虑,使用STM32L051C8T6 作为定位卡标签的主控单片机,其内置32 位的Cortex™-M0+内核,最高工作频率可达32 MHz,其供电范围为DC1.65~3.6 V,非常适用于电池供电场景;在3.3V供电条件下,待机模式的最大功耗可降至0.89 mW,全速运行时的最大功耗也仅为290 mW,在低功耗方面优势明显。
(4) 存储模块
存储模块是用于存储与UWB技术相关的数据和配置信息的一个特定模块。可以用来存储UWB设备的参数设置、通信协议、校准数据、卡号和其他必要的信息。在断电或重启的情况下,存储的数据仍然能够被保留。
(5) 声光报警模块
声光报警模块用于提示UWB通信状态及报警状态,能够通过声音和灯光警示来提供即时且高效的安全告警功能。
读卡基站的硬件设计
读卡基站主要由UWB信号无线收发模块、电源管理模块、主控单片机、10/100 Mbit/s 自适应的以太网收发电路和数据存储电路等部分组成。
(1)UWB信号无线收发模块
UWB信号无线收发模块与定位标签卡一致,以全集成的UWB射频收发器DW1000 为核心,内部集成了射频前端、数字处理单元和基带处理单元,能提供高速的数据传输和精确的测距能力,具有多种工作模式和丰富的接口。主控单片机通过SPI 总线对其控制,实现对定位标签卡的精确定位功能。
(2) 电源管理模块
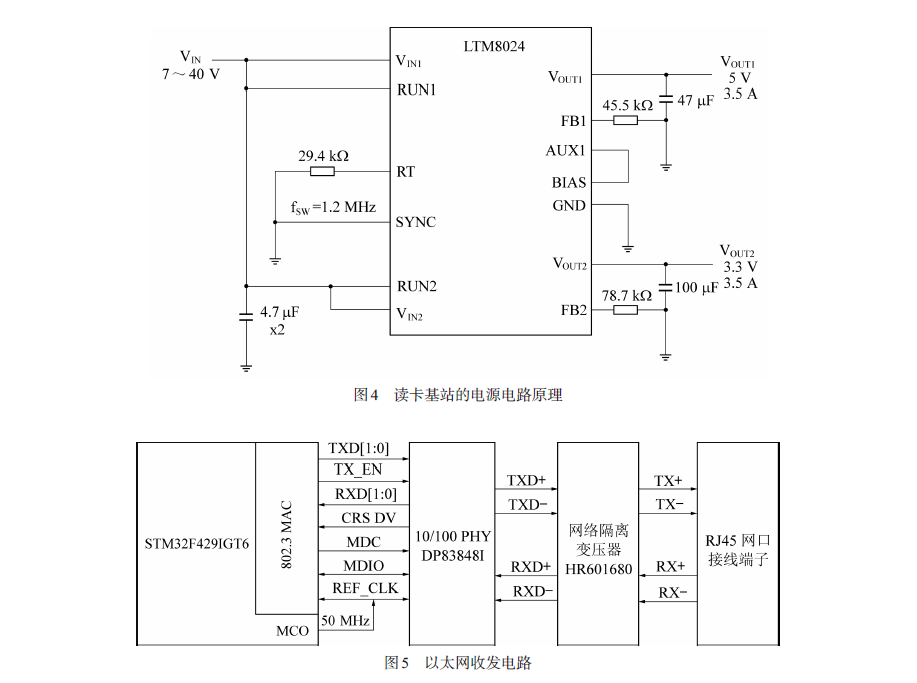
读卡基站同时需要DC 5 V和DC 3.3 V电压,为简化电路设计,使用LTM8024 双路降压型DC/DC开关转换器。可将7~40 V 输入提供5 V/3.5 A和3.3V/3.5 A双路输出。
LTM8024 是一款具有电流模式控制方案的固定频率的开关稳压器。开关频率由连接在RT引脚和大地之间的相应电阻器进行设置。可以使用RUN引脚将LTM8024 设置为微功耗关断模式。当每个通道的输出电压超出±7.5%的调节窗口时,该通道的电源正常输出将变为低电平。读卡基站的电源电路原理如图4 所示。
(3) 主控单片机
读卡基站采用STM32F429IGT6 作为主控单片机,其内部集成Cortex™-M4 内核(具有浮点单元)工作频率为180 MHz,内含1 024 KB Flash 和256KB RAM。在180 MHz频率下,从Flash 存储器执行时,STM32F429 单片机能够提供225 DMIPS/608CoreMark 性能, 并且利用ART 加速器实现了FLASH零等待状态,具有2 个CAN2.0 B接口和1 个10/100 Mbit/s 以太网MAC,带有专用DMA,支持MII和RMII接口。
(4) 10/100 Mbit/s自适应的以太网收发电路
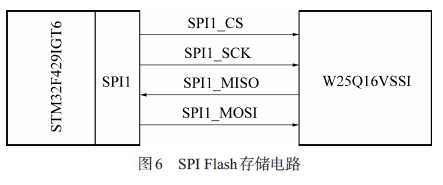
以太网收发电路包括以太网物理层转换器DP83848I、网络隔离变压器HR601680、RJ45 网口组成。以太网收发电路如图5 所示。
DP83848I 具有自适应速率和自动协商、强大的诊断和监测功能,本设计DP83848I 设置为精简的独立于介质的RMII接口,将以太网通信所需要的引脚数从16 个减少到7 个,从主控单片机上获取50 MHz的时钟源。
以太网收发电路采用HR601680 为网络隔离变压器,使DP83848I 与外部隔离,增强抗干扰能力,抑制信号杂波,同时增强传输距离。
(5) 数据存储电路
数据存储电路采用串行闪存芯片W25Q16VSSI, 具有256 Mbit 的存储容量。主控单片机STM32F429IGT6 通过SPI 总线对其进行读写控制,用于存储UWB 无线通信参数、以太网通信参数、采煤机精确定位数据等信息,用以实现读卡基站设备断电重启后的关键参数直接读取以及读卡基站的断网续传功能,SPI Flash 存储电路如图6 所示。
采煤机UWB 定位系统嵌入式软件设计
RT-Thread 实时操作系统
定位标签卡和读卡基站均采用RT-Thread 实时操作系统,发挥其实时多任务处理能力。RT-Thread是国产的一款开源的实时操作系统,包含丰富的外设组件:文件系统、TCP/IP 协议栈、libc 接口、图形用户界面、MQTT等等。
TCP/IP 协议栈
在读卡基站与地面上位机定位系统之间的数据交互是通过以太网实现的,读卡基站采用轻量化的LwIP 协议栈。LwIP 几乎支持 TCP/IP 中所有常见的协议,具有高度可剪裁性,不需要的功能都可以通过宏编译选项去掉,资源开销低,内核处理数据包的效率高。
主要线程设计
主要线程设计包含3 个部分,分别为上电初始化线程、定位标签卡的UWB发射线程、读卡基站的位置计算和数据转发线程。
(1) 上电初始化线程
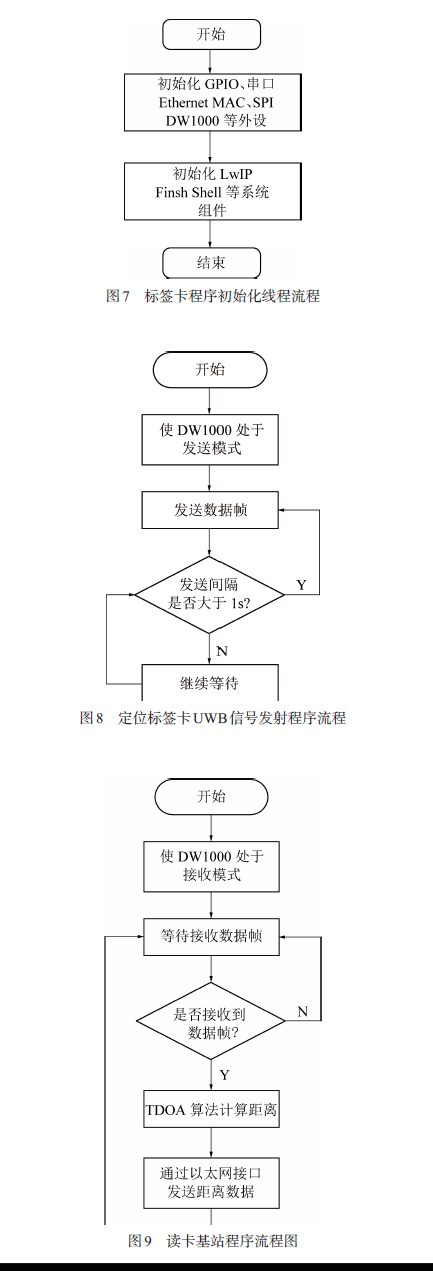
定位标签卡和读卡基站的上电初始化流程是基本一致的, 上电之后, 由RT-Thread 操作系统对GPIO、串口、Ethernet MAC、SPI 接口、UWB信号收发模块等进行初始化(图7)。
(2) 定位标签卡的UWB发射线程
定位标签卡的主控单片机STM32L051C8T6 通过SPI 总线控制UWB信号无线收发模块的DW1000射频信号收发芯片, 使其处于发送模式, 配置DW1000 通信参数(通道数、频率、数据速率、引导码、PAC、SFD等),接着使能发送中断,将数据写入DW1000 的发送缓冲区,发送缓冲区内数据。定位标签卡UWB信号发射程序流程如图8 所示。
(3) 读卡基站的位置计算和数据转发线程
读卡基站的主控单片机STM32F429IGT6 通过SPI 总线控制UWB信号无线收发模块的DW1000 射频信号收发芯片,其控制过程与定位标签卡相似(图9)。首先使DW1000 处于接收模式, 配置DW1000 通信参数,然后设置应答机制,等待接收的UWB报文数据,获取报文的时间戳信息,按照TDOA算法计算读卡基站与定位标签卡的精确距离,并将计算后的距离通过以太网上传给地面上位机定位系统。
预期应用效果
将定位标签卡安装于采煤机的左或右牵引部,定位基站安装在液压支架立柱前面的顶板上,定位基站的天线朝向定位标签卡的安装位置,可最大程度上减少UWB信号传输路径上的遮挡干扰。
采煤机UWB定位系统,结合惯导系统,可实时监测、掌握采煤机的实际位置和姿态,定位精度高,为采煤机记忆割煤、开采工艺决策、工作面“三机”联动、智能化采煤提供参考依据,可以提高工作面的开采效率。采煤机UWB定位系统可以实现高精度的定位和实时监控,提供对采煤机的精确管理和控制,这种定位技术在矿山行业中具有很大的潜力和应用价值。采煤机UWB定位系统在煤矿上的预期应用成效包括:
(1) 提高采煤效率
采煤机UWB定位系统能够准确测量和跟踪采煤机在矿井中的位置和运动状态。通过实时监测和调整采煤机的位置,可以提高采煤机的工作效率,避免重复开采和资源浪费,从而有效提高煤矿的生产能力和经济效益。
(2) 保障矿井安全监测
采煤机UWB定位系统还能够为煤矿工人提供安全预警和避难指引。在紧急情况下,该系统能够迅速定位采煤机和被困人员,为救援行动计划提供精准的方向,保障煤矿工人的生命安全。
(3) 优化设备维护
通过监测和分析采煤机的工作参数和状态,采煤机UWB定位系统能够实现对设备的实时巡检和故障诊断,及时发现和处理设备故障,减少停机时间,提高设备的可靠性和稳定性,降低维护成本,同时也延长设备的使用寿命。
结 语
采煤机UWB定位系统,能够弥补单一惯导系统在采煤机定位方面的不足,可实现对采煤机的精确定位,具有定位精度高、实时性好、功耗低等优点,符合煤矿综采工作面的使用条件,在煤矿上具有广泛的应用前景。同时,通过后续的改进和优化,该系统有望进一步提高定位精度和可靠性,为煤矿生产提供更好的支持。
- 相关推荐
