矿用本安轨道巡检机器人设计与应用
时间:2022-04-11 作者:张爱民 来源:智能矿山网 分享:2019年,原国家煤矿安全监察局制定公布了《煤矿机器人重点研发目录》,聚焦关键岗位、危险岗位,重点研发5类、38种煤矿机器人。煤矿灾害严重、风险大、井下人员数量多、危险岗位多,研发应用煤矿机器人有助于减少井下作业人数、降低安全风险、提高生产效率、减轻矿工劳动强度。
煤矿井下重要设备需要定期进行巡检和维护,但由于设备数量众多、布局分散,目前多依赖于人工巡检和维护,导致巡检维护工作量大,成本高,且存在一定的安全隐患。为克服人工巡检维护的过程风险、漏检风险,通过机器人技术辅助或者代替人工巡检,可最大限度地减轻工人的劳动强度,降低人工巡检的安全风险,实现有效、可靠巡检。
矿用本安轨道巡检机器人整体设计方案
主要功能
矿用本安轨道巡检机器人采用轻型轨道运行,井下分段铺设,实现水平、曲线、环形与往返运动,自身搭载电池、无(有)线通信模块、视频监测模块、瓦斯监测模块,可实现无(有)线覆盖巷道内的巡检工作。当巡检仪检测到前方有人员、设备等障碍物时将自动停车;当巡检仪负载增加后,电流超过设定值时将自动停车。巡检机器人控制系统主要由一套嵌入式单片机和部分硬件电路组成,具有以下6项功能:
1)完成巡检机器人自动、手动运行控制和速度给定。
2)巡检机器人控制与监测核心电路板。可监测电机的电压、电流、温度、电池电量,以及巡检机器人的位置、姿态、自身振动情况,可控制电机的正反转,具有外部功能搭载模块的对接接口。
3)完成视频采集。
4)完成工作环境监测。如瓦斯浓度监控、烟雾监控、温度监控等。
5)完成声音采集上传,保证音频采样率能满足后期故障识别的需求。
6)采用有线通信和无线通信相结合的井下通信方案,拓展通信距离,解决井下机器人群协同和远距离作业的需求。
机械结构设计
矿用本安轨道巡检机器人由巡检机器人轨道、支架、挂载部分、巡检机器人本体、控制模块等组成,如图1所示。
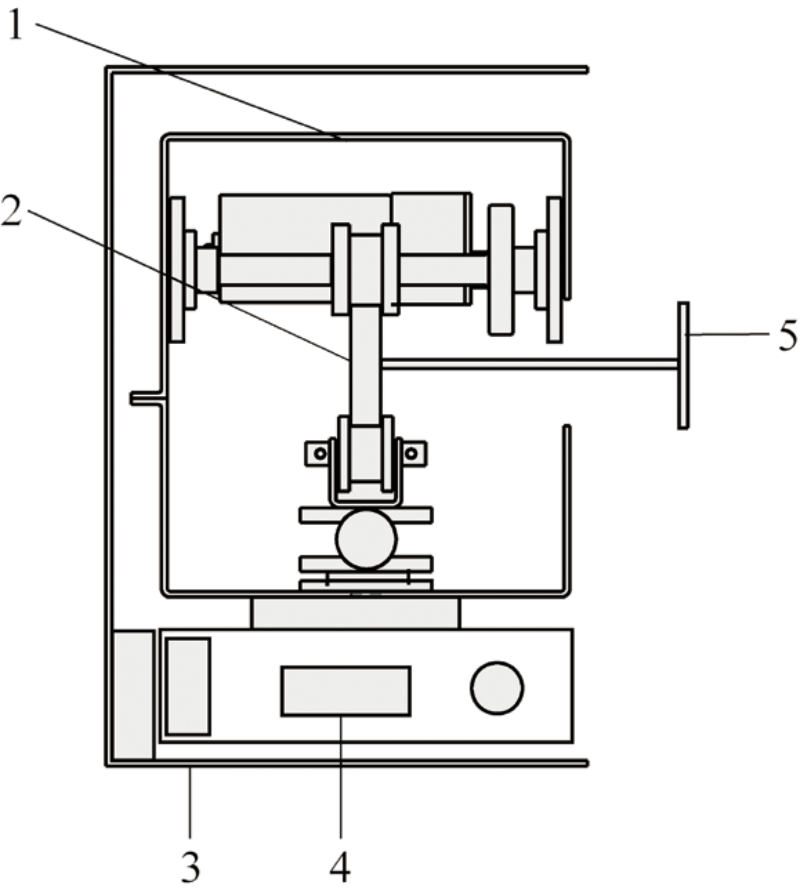
1—巡检机器人本体;2—巡检机器人轨道;3—挂载部分;4—控制模块;5—支架
图1 矿用本安轨道巡检机器人
其中,巡检机器人的轨道选用型材方管制成单轨,优点为以下3点:①能适应煤矿井下巷道的曲折变化;②单轨轨道的摩擦力小,节约动力能源,减小巡检机器人本体的质量;③成本低。
巡检机器人本体设计方案优点为以下4点:①可以实现巡检机器人在单轨轨道的任何部位都可方便地安装及取下;②可以实现巡检机器人无障碍通过单轨轨道的连接部分及安装支架;③结构简单可以减小巡检机器人的外形尺寸;④可实现小转弯半径,经测试最小转弯半径为670 mm。

图2 矿用本安轨道巡检机器人
本体结构尺寸设计
1)选定符合本安要求的电机作为矿用本安轨道巡检机器人的动力,本安技术实际上是一种低功率设计技术,利用现有的一款有本安安标证的电机作为动力源,电路设计按照本安电路的设计要求进行设计,并采用到位检测、无线充电技术。
2)根据电机动力计算矿用本安轨道巡检机器人的质量。设计时,首先根据本安电机的功率、转速等参数确定转矩;然后根据计算的转矩和本安轨道巡检机器人假定的行驶速度等参数计算出所需的牵引力;最后根据牵引力和现场所需爬坡角度确定矿用本安轨道巡检机器人的质量,同时需要保证可在斜坡行走,以及突然断电、故障或控制停车时,能可靠停车不溜车。本巡检机器人能满足在30°的坡度场所运行及驻停。
3)根据计算得出矿用本安轨道巡检机器人的质量和主动轮半径等参数来设计结构尺寸,选择符合结构刚度要求的材质完成轨道巡检机器人整体的结构设计,最终实现巡检机器人本体及挂载部分外形长×宽×高为150 mm × 130 mm × 230 mm,本体质量不到2 kg,如图2所示。
试验及分析结果
坡度运行试验
选取19种坡度,对整体质量(含负载)3.5 kg的矿用本安轨道巡检机器人进行坡度运行试验,试验结果为3.5 kg 轨道巡检机器人在0°~ 35°的坡度可以运行,而在40°以上的坡度则无法运行。煤矿巷道坡度为15°~ 28°,3.5 kg的矿用本安轨道机器人能满足煤矿实际需求。
坡道转弯运行试验
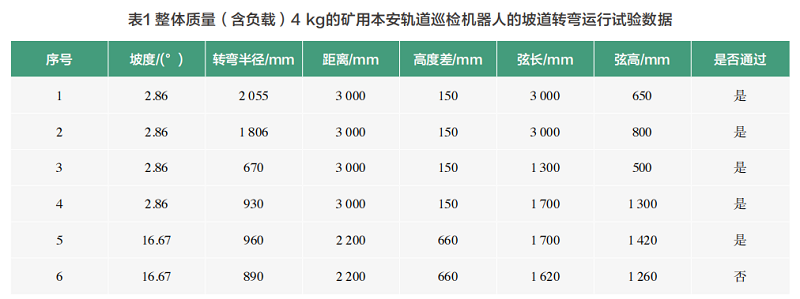
对整体质量(含负载)4 kg的矿用本安轨道巡检机器人的坡道转弯运行进行试验,试验数据见表1。由表1可知,负载总质量4 kg的矿用本安轨道巡检机器人,在坡度16.67°、转弯半径960 mm的条件下能通过;坡度近3°、转弯半径670 mm的条件下能通过;坡度16.67°、转弯半径890 mm的条件下不能通过。整体质量(含负载)4 kg的矿用本安轨道巡检机器人在巷道坡度约16.5°、转弯半径1 m的条件下能转弯,适合煤矿井下狭窄空间的应用。
矿用本安轨道巡检机器人速度范围如图3所示。由图3可知,程序脉冲宽度调制值与本安机器人速度的对应值为150。脉冲宽度调制值的有效调值范围为40 ~ 150之间,对应的本安机器人可调速度分别为25 ~ 144 m/h和180 ~ 936 m/h;通过2款电机的驱动可使本安机器人的2款产品能基本覆盖满足速度为25 ~ 936 m/h的要求。速度范围试验通过调节两款电机的脉冲宽度可以调节矿用本安轨道巡检机器人的速度,最慢速度0.007 m/s,最快速度达到0.26 m/s,可适应各种场景。
其他3项试验包括:
1) 矿用本安轨道巡检机器人试运行时本安电机的电压和电流,试验结果为:在空载与负载坡度为1.5°的情况下,矿用本安轨道巡检机器人起动电流、运行电流无区别,且电流很小,非常省电,适合长距离运行。
2) 矿用本安轨道巡检机器人各电器部件电流测试,试验结果为:矿用本安轨道巡检机器人主要耗电为云台摄像机和语音喇叭,其静态电流约为0.4 A,动态电流约为1.5 A,符合电压12 V电流小于2 A的本安防爆要求,适合煤矿井下使用。
3) 矿用本安轨道巡检机器人无线充电距离及电压测试,试验结果为:当无线充电的送电线圈与充电线圈间距离在12 mm之内,充电正常,无衰减;当送电线圈与充电线圈间距离大于12 mm,则无法充电;另外,送电线圈与充电线圈的中心要对正,偏离不得超过20 mm。
矿用本安巡检轨道机器人优势分析
1)利用机器人对设备进行巡检,不仅具有人工巡检的机动性、智能性,且克服和弥补了人工巡检的一些缺陷和不足,更适应矿山智能化和无人值守巡检技术的发展方向。
2)矿用本安型巡检轨道机器人实用性强、设计科学、结构紧凑、外形小巧、占用空间少、行动轻便、功能完善,不仅能从视频、声音、环境气体、温度、烟雾等方面对带式输送机进行全方位监控,而且具有能沿适应性强的轨道进行行走,连续工作时间长、移动无噪声污染及工作性能可靠等优点。避免了受煤矿井下复杂工况对机器人行走的影响,同时解决了机器人井下自动充电的技术难题。本安无线充电是井下的先例,使煤矿巡检机器人更加贴合巡检要求。
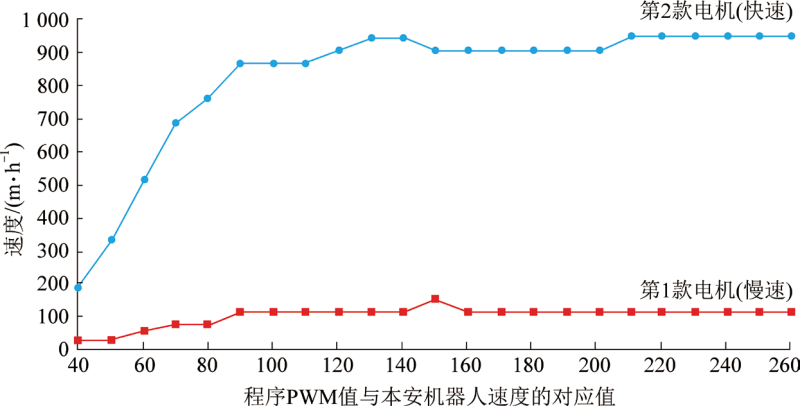
图3 矿用本安轨道巡检机器人速度范围
3)矿用本安型巡检轨道机器人利用自身小巧、自动化、通信、机械等技术,在架设的轨道上自由移动,不仅可按照要求对重要设施进行巡检和维护,当发生事故时,还可利用自身体积小的优势,准确移动到事故现场,及时反馈现场情况。
- 相关推荐
