矿山运输装备智能化技术研究现状及发展趋势
时间:2022-01-07 作者:葛世荣,袁晓明,鲍 来源:智能矿山网 分享:近年来,我国兴起了煤矿智能化建设大潮。2019年1月,国家煤矿安全监察局发布《煤矿机器人重点研发目录》;2020年3月,国家八部委联合下发《关于加快煤矿智能化发展的指导意见》;7月,中国煤炭工业协会组织召开煤矿智能化技术创新论坛,在开幕式上《煤炭学报》发布了“煤矿智能化关键技术”专题论文;9月,全国煤矿智能化建设现场推进会在山东能源集团召开。经过数年建设,我国煤矿智能化建设取得了跨越式发展,已建成近200 多处不同层次的智能化采煤工作面,形成了35项成熟的智能控制技术,这表明我国已经进入煤矿初级智能化阶段。但是,相比较于智能化技术发展较快的煤矿采掘系统,矿井运输系统的智能化水平仍然较低,严重制约了我国矿山智能化建设进程。
矿山智能运输系统的关键在于,通过对矿山运输装备的驱动系统、控制系统、运维系统和驾驶系统等方面进行智能化设计与改造,基于智能化矿山运输装备实现矿山无人化运输。近年来,国内在煤矿运输装备智能化方面取得了重要进展,例如:智能型刮板输送机为无人化采煤工作面提供了重要装备支撑;大功率永磁直驱电机及其智能控制技术为带式输送机安全高效运行奠定了可靠动力基础;煤矿井下电机车无人驾驶系统关键技术取得了一定突破等。笔者通过对国内外矿山运输装备在智能驱动、智能控制、智能运维与无人驾驶等4个方面共计14项关键技术的调研分析,归纳总结其技术现状与研究不足,在此基础上提出未来矿山运输装备的智能化发展方向。
1 矿山运输装备智能化驱动技术
驱动系统作为矿山运输装备的动力源,它的工作效率将直接影响整机的运行效率。为了提高智能化程度与工作效率,固定式矿山运输装备正由传统异步驱动逐渐向永磁变频驱动、直线电机磁悬浮驱动等新型驱动方式发展,移动式运输装备开始由单一动力向混合动力发展,而摩擦式驱动装备的张紧装置也发展出机-电-液结合的多样化智能张紧方式。
1.1 传统异步驱动技术
异步驱动具有结构简单、可靠性高、成本低等优点,是目前工业生产中应用最为广泛的驱动技术。目前,带式输送机、刮板输送机、矿井提升机等矿山运输装备仍主要采用异步电机驱动。常见异步驱动系统的基本组成为“异步电机+减速装置+执行机构”。早期的刮板输送机与带式输送机为适应低速重载多采用TTT、CST等机械式软启动方式,现多已被智能化程度较高的变频驱动替代,且正朝着智能化控制方向发展。例如,中国矿业大学研制了一种基于模糊神经网络节能模型的带式输送机智能驱动系统;德国Breuer公司从20世纪末就将异步变频驱动技术应用于刮板输送机驱动系统中;2015年,卡特彼勒公司生产的首套长臂工作面异步变频刮板输送机系统在同煤集团投入使用;太原科技大学研究了重型刮板输送机驱动系统的动力学特性与智能控制策略;黄陵一号矿621智采工作面刮板输送机智能驱动系统实现了实时变频调速、自动链条张紧等智能控制功能。
矿井提升机驱动系统的基本结构为提升卷筒+减速装置+驱动电机,可分为直流电机驱动与交流电机驱动。直流电机因存在过载能力差与环境适应性差等问题,大型矿井提升机现多采用交-直-交变频控制的交流异步电机驱动系统。为提高提升机驱动系统的智能化程度,以西门子、ABB等公司为首的国外变频器生产商研发了针对矿井提升机异步驱动系统的高性能大功率三电平高压变频器;在国内,新风光电子科技公司研发了以TMS32F2812为控制核心的交流异步变频驱动系统;中国矿业大学谭国俊团队研制了矿山大功率提升机全系列变频智能控制技术与装备,设备性能超越国外同类产品,达到世界先进水平。
1.2 永磁变频驱动技术
近年来,随着电力电子与控制技术的高速发展,永磁变频驱动技术已经在多个行业得到应用。例如,ABB公司研制38 MW永磁同步电机用于舰艇的推进系统;STEFANO将永磁驱动技术引入电梯提升系统的研究中,但国外鲜有对矿山设备永磁驱动技术的研究。永磁同步电机的低速大转矩特性特别适合用于矿山运输装备的低速重载驱动需求,近年来国内在矿山装备永磁变频驱动技术方面取得了重大进展。根据永磁同步电机与执行机构之间是否连接减速装置,可分为永磁变频直驱系统和永磁变频半直驱系统。
永磁变频直驱技术首先在带式输送机上得到实际应用(图1),现已在煤矿广泛推广。例如:北京百正创源公司与中国矿业大学联合研制的带式输送机全永磁智能驱动系统,可实现长距离大运量带式输送机的多点永磁直驱与永磁智能张紧,还可实现包括双闭环矢量控制、柔性重载启动、多机协调控制等多种智能控制策略,已应用于高家梁、红庆河等多个煤矿。

图1 全永磁智能驱动的带式输送机
在刮板输送机永磁变频改造方面,中国矿业大学提出了刮板输送机永磁变频直驱系统,并针对该系统设计了基于负载特性的复合滑膜控制方法;北京百正创源公司研发了更有实用性的永磁变频半直驱系统,采用集成一级行星减速装置的新型永磁半直驱电机,在缩小电机体积与减小传动链长度的同时实现刮板输送机低转速、大转矩运行,推进了永磁驱动技术在刮板输送机上的应用。
在矿井提升机永磁变频驱动改造方面,贵州高原矿机公司研制的永磁内装式矿井提升机,将外转子永磁体安装在提升机摩擦轮,在变频器的控制下电机转矩不需减速装置可直接传递给摩擦轮,实现了矿井提升机高效永磁直驱,现已在国内多个煤矿得到应用。
1.3 直线电机磁悬浮驱动技术
直线电机磁悬浮驱动是一种不需中间转换机构就能够将电能直接转换成直线运动机械能的驱动技术,利用初级和次级在行波磁场作用下产生的法向力和推力实现非接触式直线驱动,可用于轨道运输车辆与矿井提升容器这一类直线运输的矿山运输装备中。2010年,美国成功研制了第1台永磁直线电机驱动的大功率提升系统,标志着直线电机垂直提升系统已由研发阶段进入了应用阶段。在国内,中国矿业大学率先开展了直线电机磁悬浮技术在矿山运输装备领域的应用研究。例如:葛世荣等提出了一种直线电机轨道驱动式井下磁悬浮列车,可适应不同的运输坡度和转角,有效提高了井下轨道运输的效率和爬坡能力;鲍久圣提出了图2所示的采用“钢丝绳主提升+直线电机辅助提升”的新型矿井提升系统复合驱动方案,可在国内目前最大50 t箕斗和60 t罐笼的基础上再额外增加20%以上的载重,实现多动力混合的高效重载提升。
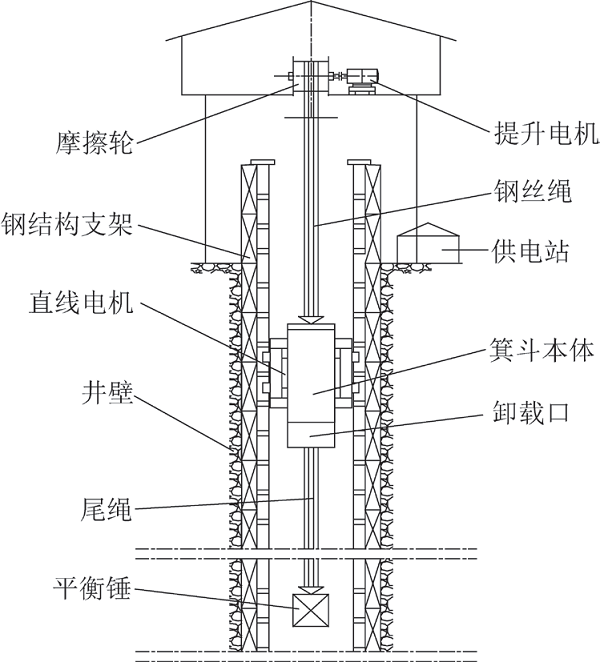
图2 垂直式直线电机辅助驱动的特大型矿井提升系统
1.4 矿用混合动力驱动技术
矿用移动式运输装备如无轨胶轮车、单轨吊车,因具有强机动性、高效运输的优势,正逐渐发展成为我国煤矿辅助运输的主力装备,主要采用防爆柴油机或蓄电池驱动。防爆柴油机驱动的动力充足,但工作效率低,且会带来严重的空气污染及噪声;蓄电池驱动具有清洁无污染及循环使用的优点,但动力不足且续航能力有限。为适应不同工况及生产运输需求,井下防爆混合动力驱动技术成为重要发展方向。
目前,国外对于混合动力技术的研究主要集中于路面车辆且已发展成熟,但在矿用车辆上的研究较少。在国内,中国矿业大学较早开展了矿用防爆混合动力技术的研究。2012年,鲍久圣发明了一种矿用混合动力无轨胶轮车驱动系统,研制了国内首套矿用防爆柴电混合动力试验台,如图3所示,防爆柴电混合动力系统由防爆柴油机和蓄电池共同驱动,既有柴油发动机动力足、续航能力强的优点,也有蓄电池环保高效、机动灵活的优点,通过模糊逻辑控制策略可根据不同工况需求实现4种驱动模式,自动适应矿用车辆在井下特殊环境下的启动/制动、加/减速、上/下坡等不同运行工况下的动力要求,使得驱动系统更加智能化,能更好满足矿山运输装备智能化驱动要求。
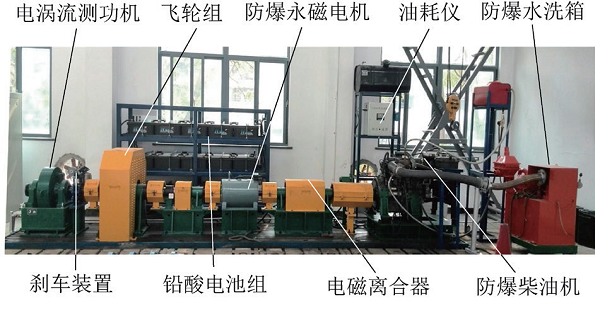
图3 中国矿业大学研制的矿用防爆柴电混合动力试验台
在露天矿运输系统中,2016年全球首款柴电混合动力卡车东风巨无霸DF45E诞生,填补了行业空白;2018年,北方股份公司成功研制出国内首台35 t级混合动力矿用车,该车发动机功率与原有同型号车辆相比较降低了30%,进一步节约了能源。
在单轨吊车混合动力方面,太原矿机公司侯建设计了一种混合防爆电喷柴油机单轨吊车系统,该系统采用混合驱动,以电喷柴油机为动力源,电气控制系统采用CAN总线通信控制,实现了齿轮驱动的控制,可提高柴油机单轨吊爬坡运载能力,有效减少防爆柴油单轨吊的尾气排放。
1.5 摩擦驱动式运输装备自动张紧技术
对于带式输送机、无极绳绞车等摩擦驱动式运输装备而言,张紧技术直接决定其驱动性能,并影响其智能化控制程度。
带式输送机张紧技术经历了机械张紧、张力可调和动态自动张紧3个发展阶段,其中:动态自动张紧装置可对带式输送机在启动、稳定运行和制动过程的不同张紧力进行自动调节,使得张紧力保持在较小的误差范围内,可实现智能张紧。国外对带式输送机自动张紧技术研究较早,例如澳大利亚ACE输送机公司研制的APW张紧绞车已被广泛应用于同煤集团和神华集团等大型煤矿企业。近年来,随着我国智能化煤矿建设发展,国内的高校和企业也相继开发出了更为先进的带式输送机自动张紧系统。例如,太原理工大学以可伸缩带式输送机为例,提出了变频自动张紧装置设计方案,简化了机械结构,解决了液压张紧装置故障率高、响应速度慢等问题;北京百正创源公司研发了永磁电机变频驱动张紧绞车(图4),输送带张紧控制更智能、效率更高、响应更快,使得永磁变频张紧由技术研究进入现场应用。
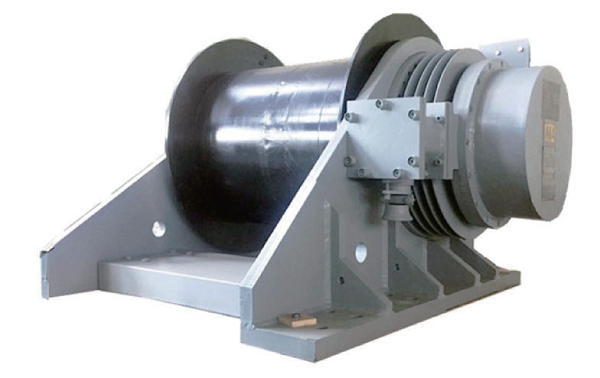
图4 永磁电机变频驱动自动张紧绞车
无极绳绞车运输距离大,钢丝绳长度变化积累量大,张紧装置要保证钢丝绳额定的牵引力,必须具有较大的吸收和张紧钢丝绳的能力。目前无极绳绞车的张紧通常采用重锤张紧,液压自动张紧也开始逐步应用。例如,中国矿业大学设计了一种以液压油缸为执行元件的无极绳牵引车自动张紧装置,即用液压缸代替重锤直接驱动三轮或五轮张紧器的动滑轮;中国煤炭科工集团重庆研究院设计了基于PID的无极绳绞车液压自动张紧系统,通过模型分析与PID控制器校正得到了具有较好动态特性的自动张紧系统。
2 矿山运输装备智能化控制技术
矿山运输装备的运行工况较其他领域更为苛刻,重载启动与负载不均衡是其主要特点,对启动、调速、制动以及多机协同等方面的智能控制技术研究是保障矿山运输装备智能化运行的重要基础。
2.1 智能启动控制技术
随着煤矿开采量逐渐增多,运输距离和载荷不断增大,矿山运输装备的功率也在同步增大,传统的电机和柴油机启动方式已难以满足矿山运输装备重载智能启动要求。
电机驱动系统直接启动具有较大电流冲击,通常需设置软启动。液力耦合器、CST可控启动装置等机械式软启动装置的传动效率低,调速性能差,价格昂贵且维护困难。Y-△降压、定子串电抗、自耦变压器等传统电气式软启动方法都是通过降压来减小启动时的电流冲击,但与此同时也大幅降低了启动转矩。晶闸管调压式软启动被认为是较有前途的一种启动方式,配合智能控制策略有望实现智能软启动。例如,肖蕙蕙基于PI滑模混合控制策略提出一种两段式晶闸管软启动控制方法,能够有效地抑制冲击电流能力,具有良好的鲁棒性;MA等提出了一种基于等效正弦调制的晶闸管软起动器离散频率控制方法,使异步电动机以较小的启动电流和较高的启动转矩启动。
矿山运输设备中的柴油机启动方式按照能量来源可分为人力启动、液压马达启动、压缩空气启动、电动机启动等。液压马达启动方式启动方便、安全可靠,但价格昂贵,目前多用于单轨吊的防爆柴油机启动系统;气动马达启动方式能源干净、价格便宜,为大多数防爆胶轮车的首选启动方式。为提高防爆柴油机启动过程的智能可控性,中国煤炭科工集团太原研究院刘继全提出了矿用防爆柴油机气动马达启动系统的优化方案。
2.2 智能调速控制技术
煤矿开采不均衡导致矿山运输装备的运煤量也不均衡,若始终以额定的功率运转,空载、轻载时会造成能量的浪费,重载时则可能导致超载故障。因此,对于矿山运输装备的智能调速控制显得尤为重要。在电机调速控制方面,中国煤炭科工集团常州研究院赵建军设计了一种模糊控制器,可根据运料量智能调节各级输送带的速度;太原理工大学王志文提出了一种基于遗传算法改进的PID控制策略,采用主从式结构,实现了输送机智能化调速;许海明设计了一种基于DSP处理器的矿用电机车交流变频调速系统,提高了机车运行稳定性,降低电流泄露风险。
电子调速器是目前在防爆柴油机中应用最为广泛的一种调速方式,涉及到的控制方法包括:PID控制、模糊控制、模糊PID控制、遗传算法和人工神经网络等。例如,徐茂以柴油机液压调速器为研究对象,基于AMESim平台对调速系统进行仿真和试验验证;惠小亮提出的B-MAXQ自适应预测PID算法在柴油机调速系统中具有更小的超调率和更短的稳定时间。
2.3 智能可靠制动技术
制动系统的可靠性和智能化程度是设备安全、可靠、智能化运行的重要技术保障。在国外,先进制动技术更多的应用于路面车辆,例如丰田汽车公司与福特汽车公司分别提出了电液复合制动技术与电液再生制动技术。而在国内,先进制动技术已开始应用于矿山运输装备中。例如,同煤集团通过对带式输送机液压制动系统进行机电液一体化改造,改善了带式输送机下滑速度不稳飞车现象;中国矿业大学张晓光为提高矿井提升机制动可靠性,提出了一种恒减速安全制动冗余液压站及其控制方法,发明了一种诊断制动故障和监测制动力的盘式制动器,研发了嵌入式制动力和力矩监测的装置,解决了制动器无法直接监测制动力的问题,实现了制动器失效智能感知;鲍久圣发明了一种磁场调控摩擦的新型磁摩耦合提升机盘式制动器,如图5所示;通过采用新型磁性闸瓦材料,利用磁场对制动器摩擦力进行智能调控,实现了摩-磁复合恒力矩制动。
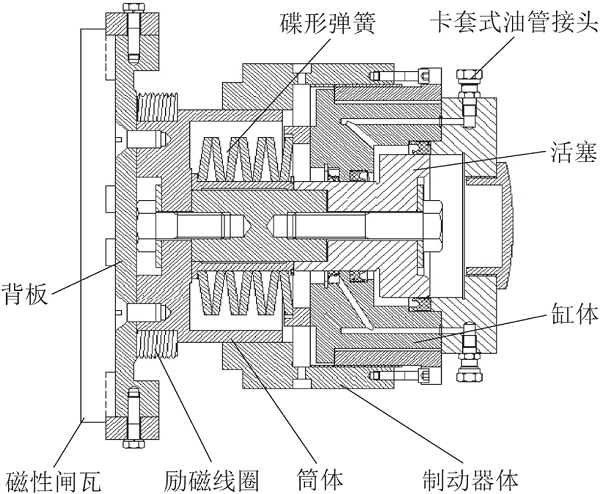
图5 新型磁摩耦合提升机盘式制动器
2.4 带式输送机协同控制技术
大运距重型带式输送机常采用多电机驱动,为此需要解决多驱动电机功率平衡问题,此外还需解决驱动电机与张紧装置之间的协同控制问题。
2.4.1 多电机功率平衡控制
多电机功率平衡常用的主从控制技术图6所示,先选定多电机驱动系统的一台电机为主电机,对其施加转速信号给定值,其余电机为从电机,通过速度PI调节器的调节,将转速信号根据设计的功率分配比值分别输入到其他电机的转矩PI调节器中,最终根据输入比例值来共同驱动负载以保证功率平衡实现多机协同控制。
实现多电机协同控制的方法还有电流平衡控制,通过实时监测电流大小来调节电机的输出功率大小。例如,毛君等通过实时监测机头与机尾2台电机电流大小来判断负载转矩变化情况,进而控制2台电机的输出转速大小,以维持功率配比动态平衡。
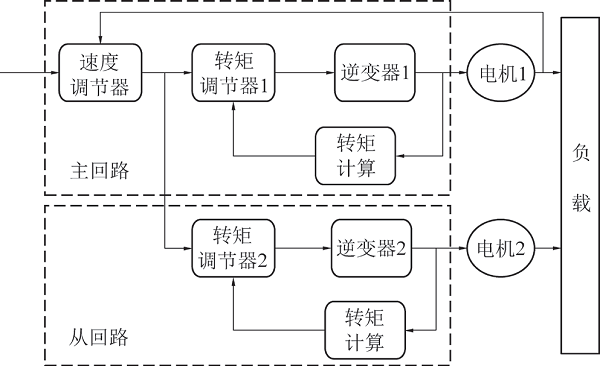
图6 多电机主从控制功率平衡逻辑
2.4.2 驱动与张紧协同技术
带式输送机为摩擦驱动式装备,为解决张紧装置与驱动系统之间的协同控制问题,北京百正创源公司提出了基于永磁张紧绞车的多闭环智能张紧控制策略,如图7所示。
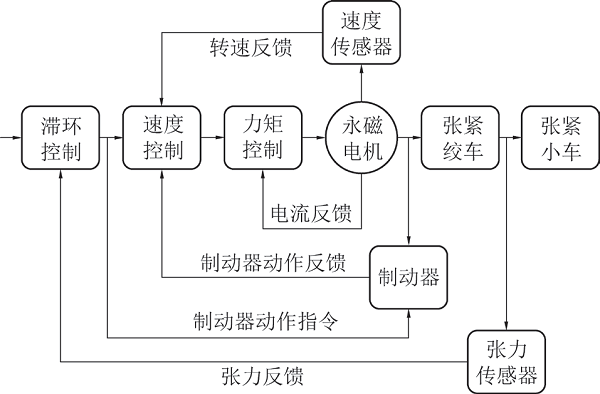
图7 多闭环智能张紧控制策略原理
在多闭环控制下,永磁张紧装置能够根据张力传感器产生变化值实时控制永磁张紧绞车收放钢丝绳以维持张紧力进而防止系统打滑,实现了带式输送机永磁直驱系统与永磁张紧装置的一体化智能协同控制。
3 矿山运输装备智能化运维技术
伴随矿山运输装备的智能化发展,维修难度大增,人工检查与摄像头定点监视等传统运维方式已经无法保障矿山运输的智能化发展,需要结合故障监测诊断、巡检机器人等技术发展智能化运维体系。
3.1 在线监测与智能诊断技术
国外矿山运输装备在线监测技术、诊断技术发展较早,并依靠传感器融合、数据通信技术等,开发出了可靠性高、稳定性高的智能系统。例如,德国研发的PROMOS系统,能够实现对带式输送机的在线状态监测。国内发展较晚,但发展较为迅速,现以刮板输送机、带式输送机和矿井提升机为例进行说明。
刮板输送机在线监测和智能诊断技术目前以研究多传感器融合和智能算法为主。例如,西安科技大学研究设计了一套基于混沌理论的故障微弱信号监测系统,并结合多传感器融合技术提高了监测结果的准确度;国家能源神东煤炭集团基于应变信号,提出一种圆环链故障检测以及无线采集方法,能够在线监测刮板输送机圆环链是否发生故障以及判断故障发生类型。
带式输送机作为煤矿运输的主要设备,常见故障有温度过高、轴承失效、输送带打滑撕裂等。为解决上述故障,研究人员提出了针对带式输送机的在线监测和智能诊断系统。例如,桂林电子科技大学基于LabVIEW软件以及小波分析等方法设计了一种带式输送机减速器齿轮和轴承的在线故障诊断系统;山西焦煤集团基于PLC控制器结合速度、温度等多种传感器设计了一套在线带式输送机故障诊断系统,既能进行在线监测状态,也能进行故障诊断。
矿井提升机在线监测和智能诊断系统主要以图像监测、结合信号分析的智能算法为主,其主要技术包括CCD成像、小波变换和智能算法等。CCD技术利用平行光照射矿井提升机提升钢丝绳,在线阵CCD上成像,并通过二值化处理、定时换算等数学方法,实现对矿井提升机中提升钢丝绳的非接触式实时状态监测;例如,上海理工大学基于CCD成像技术阐述了其在矿井提升机提升钢丝绳中的应用,能够实时在线监测钢丝绳直径、张力、损伤等状态。小波变换技术是在短时傅立叶变换局部化思想的基础上,使窗口大小随频率变化的算法,能够在时域和频域内对信号进行分析,从而在正常信号中检测出微弱的异样信号;例如,山东科技大学基于中值滤波技术以及小波技术,研究设计一套提升机轴承在线振动监测和故障诊断系统。
3.2 智能巡检机器人
带式输送机因其设备大、运输距离长等特点,在日常巡检和维修方面需要大量的人力、物力,其对智能巡检技术的巨大需求直接带动了巡检机器人行业的快速发展。巡检机器人分为移动式与轨道式,通过摄像头、传感器监测带式输送机的运行状态,可逐步取代人工巡检。
井下路面对移动式巡检机器人的耐用性影响较大,导致成本增加,未能大范围推广,目前井下多采用轨道式巡检机器人。轨道式巡检机器人采用钢丝绳牵引,监测系统由摄像头向单目相机和多传感器结合转变,采用无线通信模式,逐步向巡检智能化、无人化发展。例如,国外GOMATHIV等设计了一种基于ZigBee无线传感网络实现远程交互的煤矿巡检机器人;国内中信集团唐山开诚公司研制了图8所示的巡检机器人装置,采用相机监测,通过固定抱索器传递系统,使得机器人能够沿固定路径做往返运动,该装置目前在井下已得到推广应用;中国矿业大学提出的吊轨式智能巡检机器人系统,能够实现机器人精确定位、多传感器信息采集,同时能将信息实时传送至上位机分析处理。

图8 中信开诚公司巡检机器人井下应用
4 矿山运输车辆无人驾驶技术
井下电机车、无轨胶轮车和自卸卡车是煤矿运输中最常用的移动式运输装备,其无人驾驶技术水平很大程度上决定了矿井运输系统的无人化进程。
4.1 井下电机车无人驾驶技术
电机车是长距离水平巷道的主要运输装备,其运行轨迹固定,无需考虑电机车无人驾驶过程中的路径跟踪问题,无人驾驶难度相对较低。目前,井下电机车无人驾驶技术已趋于成熟并逐步投入使用。
厦门矿通公司提出的无人驾驶电机车系统架构如图9所示,由智能行车控制、信集闭、网络通信、机车跟踪定位、放矿远程控制、卸矿坑位监测和视频监控7个子系统组成。电机车根据调度计划自主运行,进入指定的溜井进行装矿时,溜井放矿人员结合视频监控在车厢自动精确定位后远程放矿,装矿完毕后自动进入线路运行,按计划到卸载站进行卸矿。
井下电机车无人驾驶涉及的关键技术包括:定位技术、路况识别技术、数据通信技术、传感融合技术等。在数据通信方面,合肥工业大学提出了一种启发式的矿井无人驾驶系统基站接入控制策略,有效提高基站所链接的电机车数量;在障碍识别方面,中南大学提出了传统计算机视觉技术和深度学习目标检测算法YOLOv3结合的障碍物智能检测方法;在定位技术方面,安徽理工大学设计了卡尔曼滤波器,将ZigBee无线定位与惯性定位进行融合,实现组合定位,精确检测出电机车的位置。
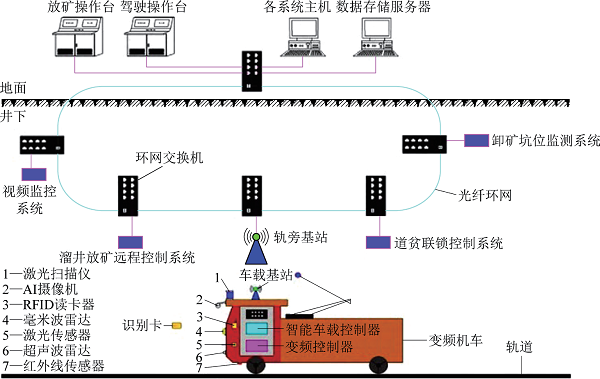
图9 井下电机车自动驾驶系统架构
国外运用无人驾驶电机车技术较早,例如瑞典的Kriuna矿早在20世纪80年代就采用了无人驾驶电机车技术。国内目前也已进入了实际应用阶段,例如:中国恩菲工程公司和铜陵有色冬瓜山铜矿联合研制的无人驾驶电机车在2012年正式生产运行,可在多列编组、双机牵引、多弯道岔道等复杂工况条件工作,工作效率提高25%,实现了减员增效;2020年,由金川集团和中国电信共同建设的5G+有轨运输电机车无人驾驶系统正式投用。
4.2 无轨胶轮车无人驾驶技术
无轨胶轮车是煤矿辅助运输系统中的重要交通工具,可用于运输物料、仪器设备以及工作人员等,具有效率高、用途广和机动性强等特点。但是,由于井下恶劣的环境以及人工驾驶的不确定性,导致无轨胶轮车运输事故频发。无人驾驶技术具有自动、高效、安全等优势,将其应用于无轨胶轮车可大幅降低井下运输事故发生率,促进井下无人化运输系统建立。
国外矿业发达国家很早就开展了井下车辆无人驾驶相关技术的研究,率先实现了地下矿用汽车的远程遥控。1996年,澳大利亚联邦科工研究组织(CSRO)与悉尼大学合作开展地下无人驾驶矿用汽车的研发工作;2007年底,Atlas Copco公司在芬兰的Kemi矿山成功进行了地下矿用汽车的自动化试验;2020年9月,SANDVIK公司研发的无人驾驶地下铲运车已经在矿井下进行试验。
国内近几年才开始关注无轨胶轮车无人驾驶技术的研究。2016年,中国煤炭科工集团太原研究院分析论证了基于4G通信技术的煤矿井下防爆车辆无人驾驶的可行性;同年,北京科技大学研究了无人驾驶地下矿车的路径跟踪与速度决策问题;2018年,中国矿业大学提出了一种红外置顶循迹的井下无人驾驶无轨胶轮车及其行驶控制方法,通过安装在无轨胶轮车顶部的红外传感器识别铺设在巷道顶部的循迹线进行导航,依靠安装在车身的多种传感器感知周围环境规划车辆动作;在此基础上,以蓄电池作为动力源,设计了蓄电池无轨胶轮车的无人驾驶系统,如图10所示。
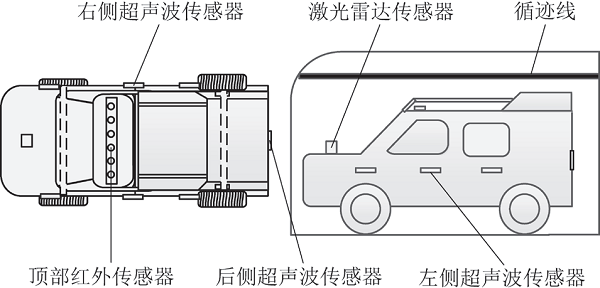
图10无轨胶轮车无人驾驶系统示意
4.3 露天矿自卸车无人驾驶技术
自卸卡车是露天矿煤炭、物料运输的主要运输装备,其运行路线比较固定,相比于无轨胶轮车,自卸卡车具备率先实现无人驾驶的条件。
国外无人驾驶自卸卡车发展较为成熟,代表性的有小松的无人驾驶运输系统(AHS)与卡特公司的矿山无人作业体系(Mine Star),现已实际应用于各大煤矿。例如,2012年澳大利亚所罗门铁矿采用了卡特生产的793F矿用自卸车,该车具有一套完整的MineStar系统,实现了环境的感知与路径规划,使得生产效率提高近30%;同年俄罗斯的矿用设备生产商别拉斯生产了一种新型无人驾驶矿山自卸车,该车取消了驾驶室,通过远程遥控的方式实现了车辆的启停与货物装卸。为了进一步提升操控精度,2016年小松公司在美国拉斯维加斯国际矿业展览会上发布了一款无人驾驶矿山运输车,该车不仅取消了驾驶室,还通过四轮控制技术,增加了车辆的可操控性;在此基础上,小松于2017年实现了830E矿用自卸车的无人驾驶改造。
国内矿用自卸卡车无人驾驶技术虽然起步较晚,但众多企业依托已有平台进行自主研发,同时对现有车型进行改造,也取得了一系列突破性的成果。例如,2018年9月北方股份MT3600型无人驾驶电动轮矿车在包钢集团进行了测试,该车采用了北京踏歌智行公司的线控技术与智能机器人技术,通过多传感器融合实现了全方位感知,同时采用数据共享网络,实现了车辆协同控制,建立了一条高效、安全的无人驾驶运输网络;同年11月份,徐工重卡公司基于百度Apollo平台架构的无人驾驶技术,研发了首款无人驾驶工程自卸车“漢沃”,该车有着较为优异的无人驾驶性能;2020年8月,航天重工以930E矿用自卸车为基础改造的载重290 t的无人驾驶矿用卡车在准能集团黑岱沟露天煤矿成功试运行,通过搭建一套包括地面控制中心系统、车地无线通信系统、车载控制系统等完整的无人驾驶控制系统,实现了矿用自卸车“装、运、卸”典型作业过程的完全无人自主运行,并实现了与钻机、电铲、推土机、平路机等露天煤矿作业关键设备的配合工作。
5 研究展望
智慧矿山、智能装备与智能化技术一脉相承,智慧矿山的实现有赖于矿山装备智能化关键技术的突破。矿山运输装备作为当前制约矿山智能化发展的薄弱环节之一,未来应在以下智能化关键技术方面加强研究和加大投入。
1)大力发展永磁电机直接驱动、混合动力驱动、直线电机磁悬浮驱动等新型驱动技术,构建安全可靠、高效节能的智能型驱动系统。
2)开发视频图像分析技术获取煤量瞬时监测数据,实现集煤流自适应启动、煤量自适应调速、绿色可靠制动和多机设备协同控制等技术于一体的煤流运输系统智能自主控制。
3)巡检机器人应搭载热成像仪、高清摄像装置、有害气体检测等多种传感器,实现多功能监控预警,并可考虑配备执行机构使其在巡检的同时也能自动完成一些应急故障修复功能。
4)开发无轨运输机器人自主充电和有轨运输机器人在轨充电技术,使矿山运输机器人的续航能力得到有效提升,有利于实现井下不间断智能运输作业。
5)单机智能研究取得更大突破,包括转弯刮板输送、分级破碎运输、仿生分拣矸石、竖井直线驱动提升等新技术,集群智能性总体提升。
6)研究井下电机车、无轨胶轮车和露天矿自卸车等多单元、多线路、多系统集成的无人驾驶运输体系,实现各环节的自主运行、无人驾驶和智能决策,最终实现全矿井一线无人化作业。
7)构建基于煤流物联网的大数据远程监控云平台,彻底改变“一机一平台”的信息孤岛状况,对智能运输系统实现实时数据采集和信息传输,实现各环节安全、高效、协同运行。
- 相关推荐
