煤矿机器人关键共性技术与发展策略
时间:2022-01-12 作者:马宏伟,薛旭升,夏晶,聂珍,王川伟 来源:智能矿山网 分享:煤炭是我国非常重要、极其宝贵、不可替代的战略资源;环境、安全等社会热点问题对煤炭工业的发展提出了严峻的挑战;实现煤炭的绿色、安全、高效、智能开采和利用已经成为全社会的共识,尤其是煤炭的智能化开采备受关注,成为研究的热点。智能化是第四次工业革命的战略目标,其根本目标就是解放生产力,让劳动者体面工作,幸福生活;煤矿智能化就是实现煤炭的智能开采和绿色利用,把煤炭人从危险环境和繁重工作中解放出来,让其体面工作,幸福生活。
2019年1月,国家煤矿安全监察局正式公布《煤矿机器人重点研发目录》,首次提出了掘进、采煤、运输、安控和救援五大类38种煤矿机器人,对每种机器人的功能提出了具体要求。2020年2月,国家发展改革委等八部委联合颁布的《关于加快煤矿智能化发展的指导意见》,吹响了煤炭工业向智能化进军的冲锋号,标志着煤炭工业迈进了实现智能化的新阶段。
煤矿机器人是煤矿机电装备的核心成员,是全面提升煤矿机电装备水平的重要前提,是构建煤矿智能化的主力军,是解放生产力的根本保证,是煤炭人实现“中国梦”的强力支撑。因此,研发煤矿机器人迫在眉睫,刻不容缓。
1 煤矿机器人的光荣使命
煤矿机器人的光荣使命就是在煤矿生产中代替人完成复杂、危险、枯燥、繁重的各项工作,从而解放生产力,提高工作效率。通过科技工作者的共同努力,创新性地研发一系列煤矿机器人,使煤矿机器人做到“恶劣环境不惧艰险,重复工作不厌其烦,复杂任务善于协作,灾难事故英勇救援”。煤矿机器人的光荣使命包括以下4个方面:
1)换人、替人、协助人。从人机关系考虑,煤矿工作任务繁多,采、掘、运、提、压、通、排等系统都迫切需要不同种类的机器人,且工作内容千差万别,需要根据作业需求,赋予机器人不同的工作内容和角色,明确机器人和人之间的任务分工,确定机器人和人间的协作关系,让人去做最轻松、最安全的工作。
2)航空、航地、航水域。从工作空间考虑,煤矿生产系统涉及的范围包括空中、地面和水域,因此,煤矿机器人应当具备在空中、地面和水域的行驶能力以及完成一定任务的能力。地域—地面救援、探测、巡检机器人,会跑,跑得快;空域—空中救援机器人:会飞,飞得稳;水域—水域环境救援机器人:会游,游得好。
3)监测、监控、监管理。从安全运行考虑,煤矿生产系统包括“人、机、环、管”,是一个庞大的系统,系统的安全运行极其重要。赋予机器人不同的监测监控功能,实现对生产系统的运行状态监测、安全监测、事故预警等;赋予机器人一定的管理职能,实现生产管理、安全管理等。
4)救险、救灾、救生命。从事故救援考虑,由于煤矿生产系统的复杂性、特殊性,研发煤矿事故救援机器人,做到有备无患。不同类型的煤矿事故,要求不同的救援机器人。事故发生后,现场情况不明,次生事故时常发生,救援人员直接进入存在巨大风险。派机器人最大限度深入现场,获取事故信息,为救援指挥中心提供第一手资料,以便及时制定科学的救援方案。危难关头,机器人冲锋陷阵,当侦察兵;重大事故面前,机器人挺身而出,当敢死队。
2 煤矿机器人的严峻挑战
1)空间有限,地形复杂。煤矿机器人的机械结构、电控系统直接受到空间、地形和环境的影响,要实现作业任务与结构、功能和性能之间的最佳匹配,对机器人的通过性、越障性、平稳性、可靠性等提出了严峻的挑战。
2)设备众多,系统庞大。存在机器人与设备、机器人与系统、机器人与机器人之间的协同控制问题,最典型的就是综采工作面和综掘工作面机器人群的协同控制问题,对机器人的控制特性提出了严峻的挑战。
3)传感检测,对象多变。对周围环境的感知、自身运行状态的感知、作业对象的感知是煤矿机器人决策的依据和前提。为了满足煤矿井下防护的要求,对传感检测系统的占空比、适应性、可靠性提出了严峻的挑战。
4)电磁干扰,信噪比低。煤矿井下空间小,机电设备多,功率大,电磁干扰严重,直接影响信息的采集、处理和传输,尤其是数据的无线传输。因此,有效提高信噪比、数据传输的实时性和保真度,给煤矿机器人研发提出了严峻的挑战。
5)环境艰险,防护严苛。煤矿井下环境条件较差,要求煤矿机器人必须具有防爆、防尘、防水、防潮等功能。严格的防护功能,增加了机器人本体结构、检测和控制硬件系统设计、制造的难度,给煤矿机器人机械、检测、控制系统的轻量化、最优化设计带来了严峻的挑战。
6)持续工作,续航不足。对于移动范围较大,且不适合使用有线电源的机器人,需要自带能源,由于电池蓄能有限,存在续航能力普遍不足的问题,迫切需要研发适用于煤矿井下的新型高能电池,对煤矿机器人电池供电系统提出了严峻的挑战。
3 煤矿机器人的关键共性技术
煤矿机器人大部分服役于煤矿井下,工作环境条件相似,因此,其关键共性技术问题亟待解决。主要包括本体的机械本体、位姿检测、自主导航、运动规划、传感检测、智能控制、通信传输、防爆防护、人机交互、健康安全等技术,如图1所示。
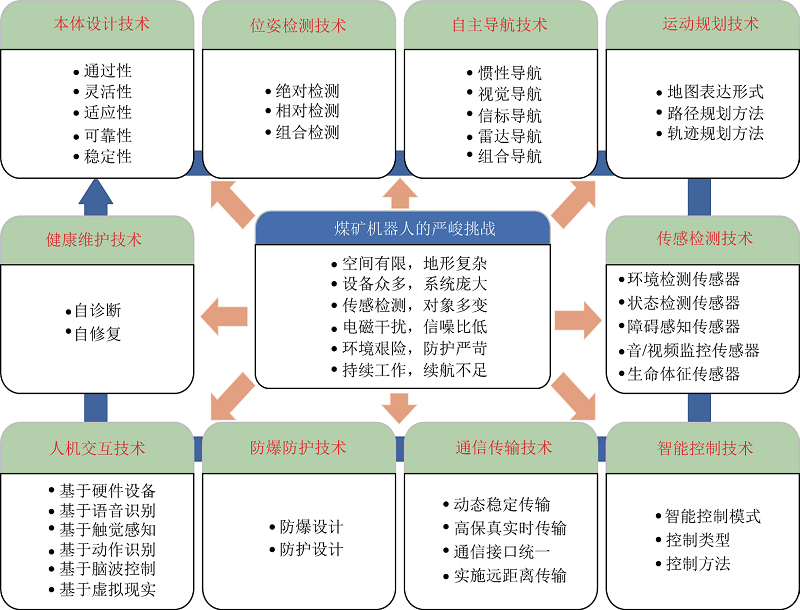
图1 煤矿机器人的关键共性技术
1)本体设计技术。煤矿机器人可靠性是机器人在生产中能否长期稳定运行的关键。我国《机器人产业发展规划 (2016—2020年) 》中明确提出了实现机器人关键零部件和高端产品的重大突破, 实现机器人质量可靠性大幅提升的要求。迫切需要深入研究煤矿机器人轻量化、最优化设计方法,研发防爆伺服电机、减速机、传感器等关键零(元)部件,研发新型的本体结构,旨在提高机器人的通过性、灵活性、适应性、可靠性、稳定性。
2)位姿检测技术。煤矿机器人的位姿检测是其精准完成任务的重要保障。位姿检测技术包括绝对检测、相对检测和组合检测等。①绝对检测有全球定位系统(BDS,GPS)、惯性导航系统(INS)、电子罗盘等;②相对检测有里程计(DR)、视觉、激光雷达、地图匹配等;③组合检测有绝对与相对检测相结合、多传感器信息融合等。煤矿机器人位姿检测的难点是井下移动机器人的位姿检测,迫切需要深入研究适用于不同机器人的位姿检测方法,旨在提高位姿检测的可靠性和鲁棒性。
3)自主导航技术。煤矿移动机器人的自主导航技术主要包括以下6种。①惯性导航:加速度计、陀螺仪、磁力计;②视觉导航:单/双目、多目、RGBD;③人工信标导航:反光板、二维码;④雷达导航:超声波雷达、毫米波雷达、激光雷达;⑤GPS/GIS导航:空间部分、地面部分、用户装置;⑥组合导航:利用2个以上的导航技术,发挥各自优势,提高导航能力。
4)运动规划技术。煤矿移动机器人的运动规划技术主要包括以下3类。①地图表达形式:点云、占据栅格、体素哈希、八叉树、TSDF、ESDF等。②路径规划方法:基于图搜(A*,Djikstra)、基 于 采 样 ( R R T ) 、 考 虑 运 动 力 学 约 束 ( H y b r i dA*,Lattice Search)。③轨迹规划方法:等式约束轨迹规划(Minimum-jerk)、软硬不等式约束轨迹规划(B-Spline)、其他(MDP,MPC)。
5)传感检测技术。煤矿机器人的传感检测技术主要包括以下5类。①环境检测传感器:获取环境温度、湿度、气体浓度等;②状态检测传感器:监测自身或被测设备运行状态,如温度、压力、振动传感器等;③障碍感知传感器:检测自身与环境障碍物位置,如激光雷达、双目相机等;④音/视频监控传感器:监控关键区域或位置,如麦克风、摄像机等;⑤生命体征传感器:监测井下被困人员状况,如呼吸频率传感器、红外热像仪等。
6)智能控制技术。煤矿机器人的智能控制技术是其实现自主作业的重要前提,针对不同结构、执行不同任务的机器人,其采用的控制模式、控制类型、控制方法不同。①控制模式:分为直接智能和间接智能,直接智能即直接采集人体信息转化为控制信息,间接智能即把人的思想转化为程序;②控制类型:分为单机器人控制、多机器人控制、虚拟现实控制;③控制方法:包括专家控制、模糊控制、递阶控制、学习控制、神经控制、进化控制、免疫控制等。
7)通信传输技术。通信传输技术是煤矿机器人与人、煤矿机器人与协同系统之间信息交互传输的可靠保障。主要包括以下3种情况:①动态工况条件下,煤矿机器人本地控制与采集信息的稳定传输;②强干扰噪声条件下,煤矿机器人井下远程控制与采集信息高保真实时传输;③多类接口情况下,大数据通信接口统一及实时远距离传输。
8)防爆防护技术。大多数煤矿机器人要在井下运行,面临防爆、防尘、防水、防潮、防腐等问题。①防爆设计:面对煤矿井下瓦斯、一氧化碳等爆炸性气体,需要对机器人进行防爆设计,主要采用隔爆型、增安型、正压型、充沙型、本质安全型、充油型等结构;②防护设计:面对煤矿井下煤尘、水、潮湿、腐蚀等恶劣环境,需要对机器人进行有效的防护设计。
9)人机交互技术。煤矿智能化对机器人的需求不断增多,由于任务艰巨,条件复杂,需要人与机器人协同工作的场合难以避免。因此,研究人与机器人的交互技术已经成为亟待解决的关键技术难题。目前,常用的人机交互技术主要包括:基于硬件设备的交互技术、基于语音识别的交互技术、基于触觉感知的交互技术、基于动作识别的交互技术、基于眼动追踪的交互技术、基于脑波控制的交互技术、基于虚拟现实的交互技术等。
10)健康维护技术。煤矿机器人的健康维护是其安全、可靠、高效运行的关键,因此,迫切需要解决煤矿机器人在全寿命周期的健康维护与智能管理问题。①自诊断:准确、及时检测机器人健康状态,实现机器人系统的预知维护和健康管理,确保机器人的开机率;②自修复:包含自适应、自补偿、自愈合技术,既包括机器人关键零部件故障的自修复,又包括测控系统计算机软硬件系统故障的自修复。
4 煤矿机器人的发展策略
国内外煤矿机器人的发展还处于初级阶段,还有诸多关键技术问题亟待解决。因此,我国煤矿机器人发展需要在国家相关文件的指引下,明确发展目标,理清发展思路,制定发展策略。结合我国煤矿智能化发展要求,提出“点-线-面贯通,水-陆-空布局,人-机-群协同,基-技-用并行”的煤矿机器人发展策略。
4.1 “点-线-面”贯通
首先,充分借助现有的成熟技术,结合煤矿需求,研发针对“点”上应用的机器人,同时,通过改造现有基础较好的机电设备成为机器人,实现机器人“点”的突破;其次,在一个线性系统上,根据任务需求,研发多个机器人,实现机器人“线”的连接;最后,基于“点”和“线”上的机器人,研发“面”上的机器人系统,诸如综采工作面、综掘工作面的机器人群,实现机器人“面”的贯通,如图2所示。
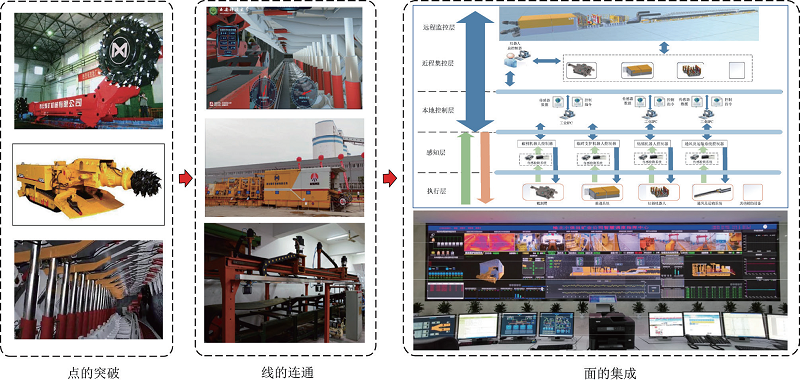
图2 “点-线-面”贯通
4.2 “水-陆-空”布局
煤矿生产系统复杂,作业任务繁多,涉及到水、陆、空等多个区域,因此,煤矿机器人的研发和机器人系统的布局,要综合考虑水域、陆域、空域作业的不同需求。在研发单区域、单功能机器人的基础上,要针对任务、多功能的要求,研发复合域、多功能机器人,努力提高机器人的适应性和可靠性,构建煤矿井下全区域、全天候煤矿机器人的有效覆盖,确保煤矿机器人作用的有效发挥。“水-陆-空”布局如图3所示。
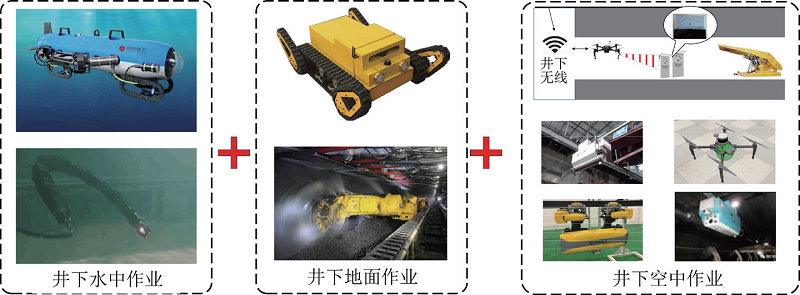
图3“水-陆-空”布局
4.3 “人-机-群”协同
煤矿机器人需要人与机器人以及机器人群之间协同工作。面向同一任务,需要人和机器人之间的协同,让机器和人分别从事自己更擅长的工作,机器承担重复、枯燥和危险的工作,人类承担创造性的工作;面向同一任务,2个机器人协同工作,根据机器人各自的特点完成同一任务;面向同一任务,多个机器人组成机器人群,需要机器人群间的协同,共同协作完成单个机器人或少数机器人难以完成的任务。“人-机-群”协同如图4所示。
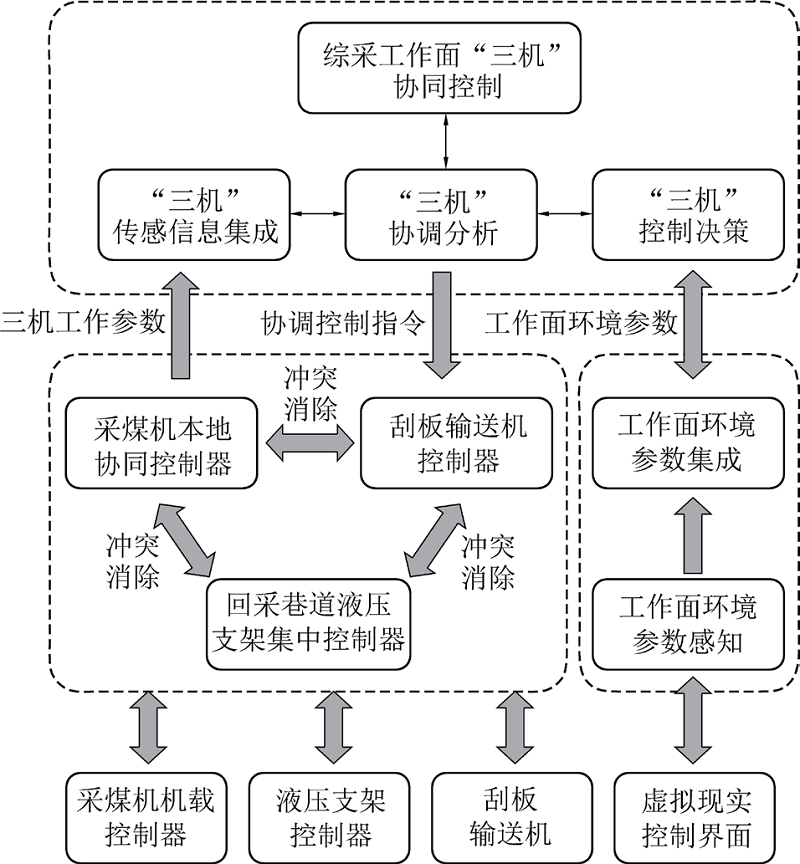
图4 “人-机-群”协同
4.4 “基-技-用”并行
煤矿机器人研发要在基础理论、技术创新、工程应用3个方面并行发力,加快构建“基础理论—技术创新—工程应用”的闭环研发系统,优化产学研用紧密协同的研发机制,创新具有中国特色的煤矿机器人研发体系。要不断加强基础研究,包括理论和方法研究,揭示规律,发明原理,构建模型,提出理论或方法等;要不断加大技术创新,将新的理论成果转化为新材料、新技术、新工艺等;要不断加强工程应用,研发新型煤矿机器人,解决煤矿生产中的难题。“基-技-用”并行如图5所示。
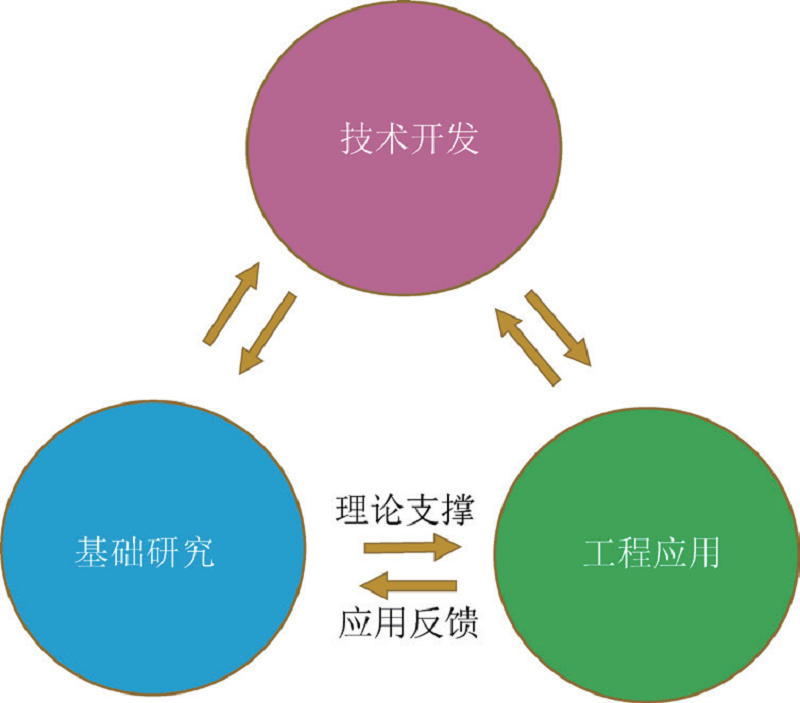
图5 “基-技-用”并行
5 结 语
我国煤矿智能化的蓝图已经绘就,煤矿机器人研发目录已经颁布,煤炭行业向煤矿智能化进军的号角已经吹响,只有抢抓机遇,协同攻关,才能破解煤矿机器人的关键共性技术难题,才能研发一批高智能、高性能、高可靠的新型煤矿机器人。
1)加快研发煤矿机器人,推动煤矿智能化,需要政府大力支持、行业高度重视、院校潜心研发、企业实施应用。
2)煤矿机器人的研究、开发和应用是一项极具复杂性、挑战性的系统工程,需要有耐心、决心和信心。
3)“产学研用结合,校企协同创新”是科技创新的有效途径,更是开启煤矿机器人关键共性技术难题的金钥匙。
- 相关推荐
