煤矿机器人技术装备及产业发展 应用实践与思考
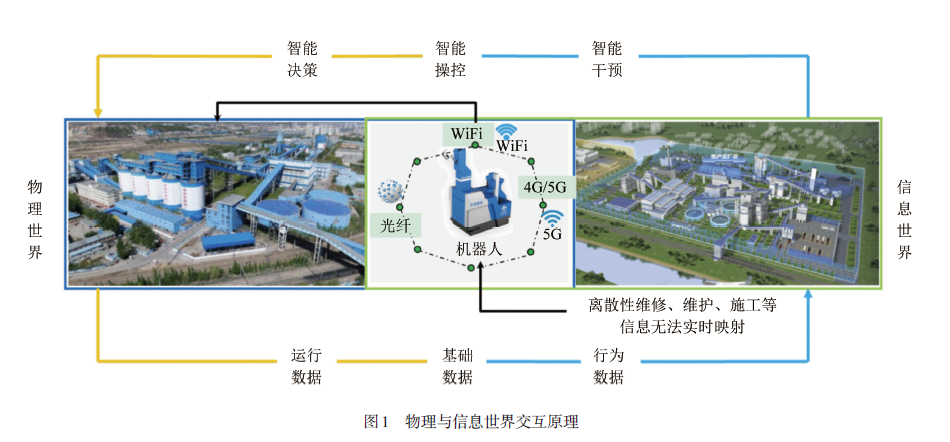
时间:2023-10-11 作者:王雷 来源:智能矿山网 分享:煤矿智能化是煤矿物理世界向信息世界的映射,而机器人是打通物理世界和信息世界连接的关键手段。当物理世界向信息世界映射时,其信息世界对物理世界的反向作用,包括维护、维修、施工、决策等,无法完全通过信息手段来实现,因此“机器人”应运而生,即采用一种在感知、执行、交互、决策等方面模拟接近人类的智能系统,可用于实现半自主或全自主工作,物理与信息世界交互原理如图1 所示。煤矿智能化政策的不断推广及煤矿企业减人、增安、提效等安全生产要求的不断增加,促使机器人在煤矿领域得到迅猛发展,煤矿机器人的市场需求也愈发旺盛。
煤矿机器人全生命周期包含关键核心技术、核心算法、元器件、前端解决方案、后端测试以及交付服务、组织管理等多个环节要素,由于目前仍处于发展阶段各环节要素不健全、不顺畅,导致现有煤矿机器人现场可靠性及实用性较差。而要真正提升机器人的实用性和可靠性则面临研发、生产、应用、管理等多个难题。研发阶段,需要攻克导航、视觉识别等共性技术,以及喷浆、抓管等工艺性技术上的堵点卡点难题,需要研制出防爆传感器、控制器等适用于机器人的矿用元器件,产品背后技术攻关困难;生产阶段,在标准化程度较低情况下,涉及供应链、工艺、组装、调试、质检等多环节的管理和调度,产品的整机制造困难;应用阶段,煤矿现场环境恶劣、任务复杂随机、人员的行为更不可控,且需要现场施工、调试验证和定制化服务,存在交付、工程管理等组织能力困难。因此,煤矿机器人研发企业既需要具备科研范畴内的研发、供应链及质量测试能力,又需要具备产业和经营范畴内的工程管理、安装调试、打造一体化组织等能力,多方面协同攻关,方能加快煤矿机器人产业建设。
国内外政策及形势研判
目前,机器人技术已成为世界主要国家重点研究领域和未来竞争的制高点,如欧盟的“火花”计划、日本的机器人新战略、德国的工业4.0 战略,各国均将机器人列为重点发展领域。尤其近年来国际形势紧张,美国已通过各类法案召集西方国家加强对我国机器人技术进行管控,如2021 年通过的《无尽前沿法案》,将机器人技术列为重点管控的方向,2023 年将机器人列入出口管制名单。在此国际形势下,如何加强机器人的自主研发能力,实现机器人国产化是当前我国机器人行业亟待解决的重要问题。
近几年,我国机器人行业一直稳步发展,从市场规模来看,已出现“服务机器人+特种机器人>工业机器人”的局面。随着国家智能化的进一步推进,国家多个部门陆续发布相关支持政策,如2020 年2月,国家发改委、国家能源局等八部委联合发布的《关于加快煤矿智能化发展的指导意见》;2023 年1 月,国家工业和信息化部、国家能源局、国家矿山安全监察局等十七部门发布的《“机器人+”应用行动实施方案》;此外,在铝镁、钢铁等行业也相继提出了各种智能化建设的指导性意见。由此可见,机器人与各个行业的深度融合、实现机器人与场景的深度应用, 已成为机器人发展的重要方向, 也是各个行业智能化发展的重要支撑。
我国属于能源消耗型国家,煤炭仍然是我国重要的主体能源,占一次能源消费比例近60%。调研数据显示,我国井下仍有200 多万矿工每天在高温、高湿、高粉尘环境下进行高强度作业,存在着人工作业强度大、风险高、作业效率低等问题,亟须用智能化手段解决当前煤矿行业面临的生产难题,以煤矿机器人为代表的特种行业机器人研发和应用则是提升煤炭行业从业人员安全,实现能源供给稳定性的重要技术创新。
煤矿机器人发展现状及存在问题
我国煤矿机器人研究开始于2004 年,最初的相关研究机构主要进行了机器人结构的简单防爆处理,缺少对关键技术理论的支撑;2012 年,随着人工智能技术的发展,逐步开始多种巡检机器人的研发和应用,初步形成巡检机器人的技术理论,解决了小场所、况良好、特征明确等环境较好空间的安全监测问题。近年来,随着国家煤矿智能化建设的高速发展,煤矿机器人技术进入了研发与应用的“井喷期”。目前,行业内已经研制出多种巡检、作业类机器人,而伴随AI 技术深度普及应用,未来将需要复合型机器人、新构型机器人及机器人集群化应用适应煤矿机器人的发展趋势。
国家矿山安全监察局相关报告中指出,我国已实现31 种煤矿机器人的应用,占据5 大类38 种的81.58%,处于研发阶段的有5 种,处于空白阶段的有2 种。但是,煤矿机器人作为机器人和煤炭行业交叉的新兴学科,总结其产品状态,仍存在以下3点问题:
(1) 煤矿机器人5 大类38 种无法覆盖全部应用场景,因为同一场景在不同煤矿的环境特征工况差别较大,目前应用的机器人并不能够覆盖单一场景下的所有煤矿,且存在系列化不足、实用化程度不高的问题。
(2) 正在研发的机器人暴露出多项共性技术难以攻克、应用工艺尚未自主化等问题,从而导致研发进展缓慢。
(3) 空白阶段机器人,受限于应用场景和当前技术水平,无法开展相关深入研究,只能进行前沿探索。
此外,煤矿机器人相关从业单位大约有65 家,但一半以上从事巡检类机器人研发,其他类机器人产品开发涉足较少。因此,鉴于煤矿井下环境的特殊性和复杂性,以及当前技术架构、标准规范确实存在的问题,煤矿机器人发展仍处于起步阶段。
深度分析我国现有煤矿机器人实用化程度较低的原因,主要体现在嵌入场景的工艺机器人化上,具体包括:①煤矿场景相较于传统机器人场景更加苛刻;②煤矿巡检、作业等工艺机器人化仍面临大量技术及理论待突破。
煤矿场景复杂主要体现在高粉尘、低照度、GPS 拒止、狭小空间、非结构化地形等,对传统机器人理论提出更大挑战。另外,煤矿井下作业工艺及任务存在对象复杂多样、标准化程度低、场景差异大、连续作业时间长、作业载荷重等特征,对机器人边界条件约束、结构设计、运动控制等提出了较大挑战。
煤矿机器人架构体系
基于上述分析,中煤科工机器人科技有限公司(简称中煤科工机器人公司) 从已研制出的巡检、作业及救援类煤矿机器人出发,梳理形成了煤矿机器人共性架构、共性堵点卡点一张图、共性关键技术等不同体系。
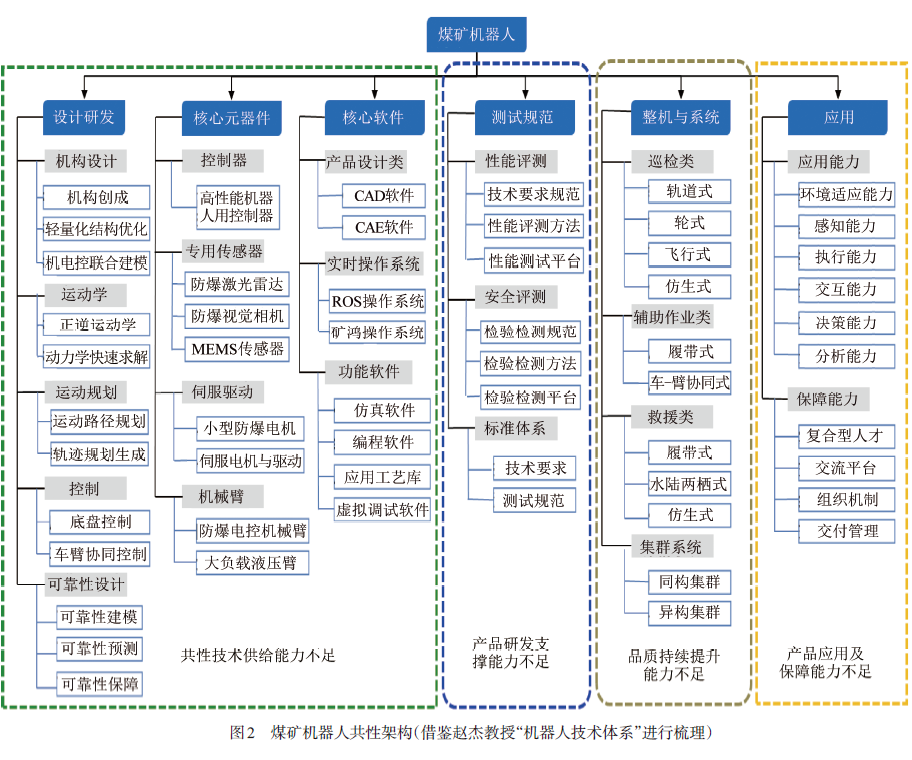
在煤矿机器人共性架构(图2) 分析方面,可划分为设计研发、核心元器件、核心软件、测试规范、整机与系统、应用六大方面。对于设计研发、核心元器件及核心软件,一方面面临监控系统时代遗留的体积大、功耗大与机器人本身小型化、低功耗需求的矛盾;另一方面受制于关键元器件的进口依赖,对外表现为产品的供给能力无法满足市场需求。此外,测试标准及测试场地的缺失,难以支撑煤矿机器人产品的全链条研发,整机与系统的整体品质、应用端的大量二次开发及感知决策能力较弱, 导致现有产品的交付及后期保障能力仍不足。
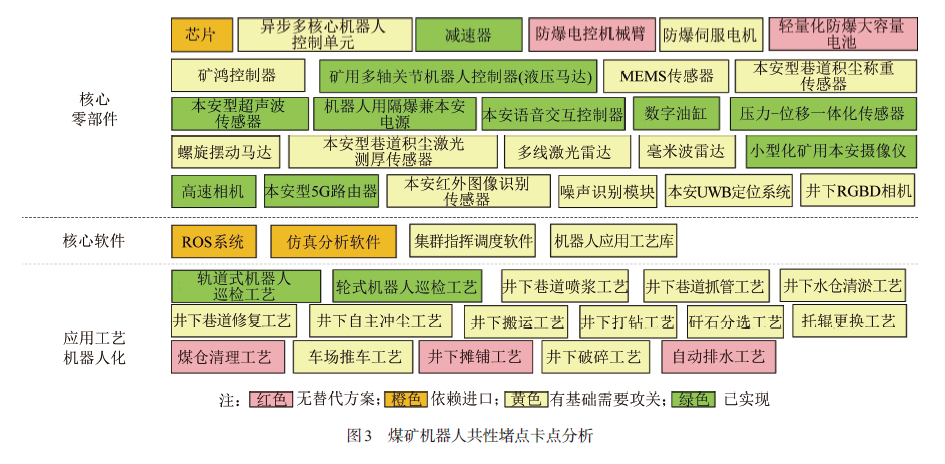
在煤矿机器人研发的堵点卡点分析中,从核心零部件、核心软件及应用工艺机器人化3 方面进行了梳理(图3)。在核心零部件方面,防爆电控机械臂、轻量化大容量防爆电池的研究与应用仍处于空白,部分芯片依赖于全进口,本安型超声波传感器、本安语音交互控制器等元部件虽完成了开发应用,但集成控制器、伺服电机、多类感知单元等仍需进一步攻关;在核心软件方面,机器人运动控制的ROS操作系统仍依赖进口,高精度视觉图像和自主导航等软件算法仍需深度攻关;在应用工艺机器人化方面,主要以辅助作业机器人为主,如煤仓清理、井下摊铺等尚未形成机器人应用,喷浆、管道安装、巷道修复等虽已具备一定的研究基础,但实用化程度仍需提高。因此,持续推动煤矿机器人相关技术及元器件由空白到实用化,是煤矿机器人的重点发展方向。
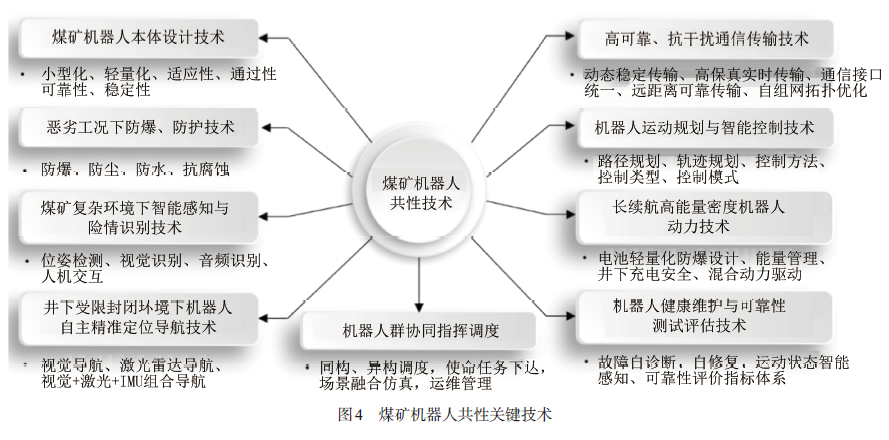
煤矿机器人共性技术主要分为本体设计、防爆防护、感知与识别、导航定位、通信传输、运动控制、高效能源、健康评估及集群指挥调度九大模块(图4)。煤矿场景环境特殊、复杂,现有机器人技术无法直接在井下应用,因此,煤矿机器人共性技术仍处于攻关阶段,距离真正实用化及系统化仍有较大差距。
煤矿机器人产品及产业问题
煤矿机器人的产品问题主要体现在分类标准、巡检机器人、辅助作业机器人及救援机器人4 个方面。
(1) 目前,煤矿机器人分类主要依据场景展开,当将场景下沉时,会发现同一场景下有多种不同机器人技术路线,导致同一场景下煤矿从业人员与机器人从业人员难以进行有效衔接。因此,需要将分类标准进一步细化,从而打通场景与技术路线的衔接。
(2) 目前,已有的巡检机器人大体上已经能够满足常规应用场景需求,但技术脉络需进一步完善,尤其对于采空区、回风立井等极端复杂场景下的机器人研发,AI 技术不能支持井下特殊环境下仿人化决策,导致复杂受限场景下巡检机器人的研发进展缓慢。
(3) 辅助作业机器人虽已开展了部分产品的研发及井下应用,但由于缺乏通用技术架构,小型化防爆、作业目标识别、机械臂控制、车臂协同控制等关键技术尚未突破,导致危重场合的辅助作业机器人仍然很难落地应用。
(4) 救援机器人整机系统与救援实际环境结合不紧密,且受限环境下的机器人感知、探测、作业等关键技术尚未突破。因此,目前救援机器人研发仍以样机为主,实际应用少、实用化程度低。
煤矿机器人产业端的问题主要集中于产业链、标准测试规范体系、行业人才、煤矿与机器人融通性4 个方面。
(1)产业链方面,小型化感知单元的缺失、传统算力平台的功耗高制约着其在煤矿场景下的实际应用,ROS控制系统、控制器等核心单元仍依赖进口,以及推动供应链体系完善的组织体系仍未有效建立。
(2) 标准测试规范及体系方面,由于缺少满足井下条件的测试环境及实验室,导致产品验证不充分,可靠性不足;此外,缺少通用的技术标准与规范导致现有产品的制造质量与性能仍不能满足现场需求。
(3) 行业人才方面,“机器人+”创新应用的复合型高端人才稀缺,具体表现为机器人开发人员对煤矿环境不理解、测试及调试人员缺少在模拟真实井下场景的环境下工作机会,导致煤矿+机器人解决方案能力较弱。
(4) 煤矿与机器人融合方面,机器人领域专家与煤矿领域专家缺少沟通交流机会和平台,缺少有效的沟通机制,导致煤矿用户及厂家对机器人的定义与需求不匹配。
综上所述,由于煤矿机器人开发存在一矿一策现状,难以通过同样的技术路线去满足同样需求下不同环境和工况对机器人的要求,进而产品的实现程度与煤矿企业的应用满意度仍无法匹配。因此,未来的行业发展需要以结合煤矿井下实际应用与客户满意度提升为目标,实现机器人关键技术突破、产业链体系逐步完善、标准体系建设加强及行业人才质量提升,以此促进煤矿机器人的落地应用,同时辐射金属矿山、铝镁、钢铁等非煤行业。
中煤科工机器人公司创新成果
中煤科工机器人公司始于中煤科工集团沈阳研究院有限公司特种机器人事业部,目前是中国煤炭科工集团国有独资二级企业,是集团发展机器人学科及产业牵头单位,致力于成为“中国矿山机器人原创技术策源地及现代产业链链长”。
成果概述
中煤科工机器人公司基于对行业的深度理解和剖析,建立了煤矿机器人行业整体性解决方案。
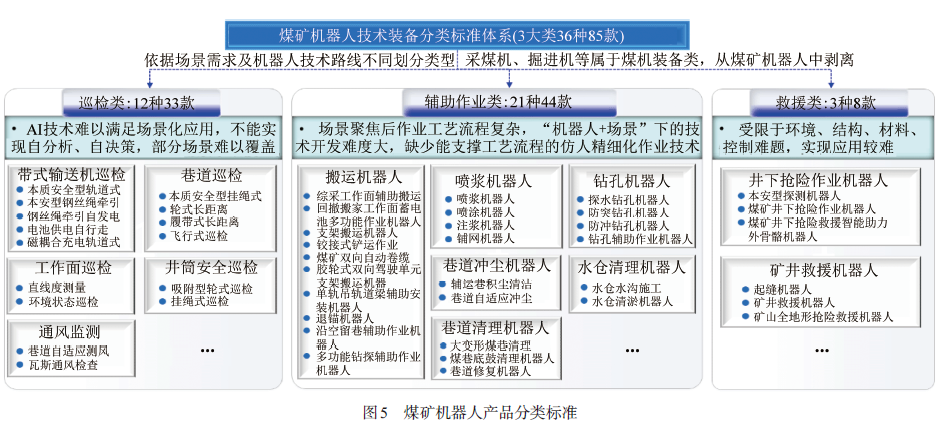
(1) 建立了基于场景与技术路线耦合式的巡检、辅助作业、救援3 大类36 种85 款煤矿机器人技术装备分类标准体系。
(2) 提出了巡检类煤矿机器人“防爆轻量化-长距离导航-多元场景感知-场景化AI-集群调度”技术架构,研制了7 种22款巡检类机器人。
(3) 形成了辅助作业机器人“防爆结构-自主导航-目标测量-作业控制-车臂协同”通用技术框架,研制了6 种12 款辅助作业机器人。
(4) 构建了AI 人工智能在矿用机器人领域中的硬件及算法国产化技术应用体系,联合国内机器人领军企业以推动矿鸿操作系统、声音技术、视觉技术等在煤矿机器人上的国产化应用。初步推动了煤矿机器人与煤矿智能化的发展,为化解煤矿安全风险、保障国家能源安全提供了重要的技术及装备支撑。
此外,中煤科工机器人公司还构建了煤矿机器人产供销一体化产业体系,组建了机器人+煤矿的多学科、多业务型综合管理团队,进一步促进煤矿机器人的产业发展。在研发方面,建立了需求分析、产品转生产等七大节点下的全流程IPD 体系,拥有研发人员200 余人,实现了产品开发市场化、技术开发产品化、产品开发平台化;在生产方面,建立了15 000 m2、涵盖有30 余种煤矿机器人的高端装备生产基地,构建了包含质量管理、库存管理、生产计划管理等多位一体生产体系;在测试方面,拥有测试人员30 余人,能够满足产品的24 h 不间断测试,同时,在建20 000m2的多场景煤矿机器人交互式数字化测试中心,可以实现煤矿机器人的全场景应用、全性能保证测试;在销售服务方面,融合了“铁三角”工作法,建立了聚焦客户需求的一线共同作战单元,实现了销售团队覆盖煤矿、非煤等全行业,拥有安装服务人员80 余人,初步建设并持续完善支撑煤矿机器人产业持续高速、高质量发展的现代服务体系。
成果详细情况
市场调研发现,除《煤矿机器人重点研发目录》中5 大类38 种机器人外,煤矿企业实际需求中还包括一些其他场景下应用的机器人,且各类型机器人存在不同技术路线,将采煤机、掘进机等大型煤矿装备从煤矿机器人中剥离,提出了场景下按照技术路线细分的产品线、子产品线的产品路标,形成了煤矿机器人技术装备分类标准体系(3 大类36 种85款,图5)。巡检类机器人主要包含带式输送机巡检、巷道巡检等12 种33 款,辅助作业类主要包括搬运、喷浆、水仓清淤等21 种44 款,救援类包含抢险作业、救援等3 种8 款。但是巡检机器人中,AI 技术难以满足场景化应用,不能实现自分析、自决策,部分场景难以覆盖。辅助作业机器人面临场景聚焦后作业工艺流程复杂,“机器人+场景”下的技术开发难度大,缺少能支撑工艺流程的仿人精细化作业技术。救援机器人则受限于灾后复杂环境,机器人本体结构、控制策略等实现困难,距离实际应用仍有一定差距。
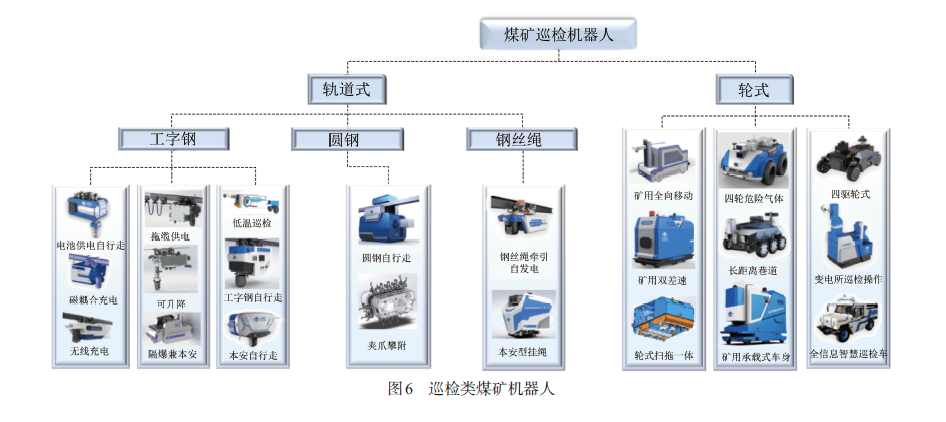
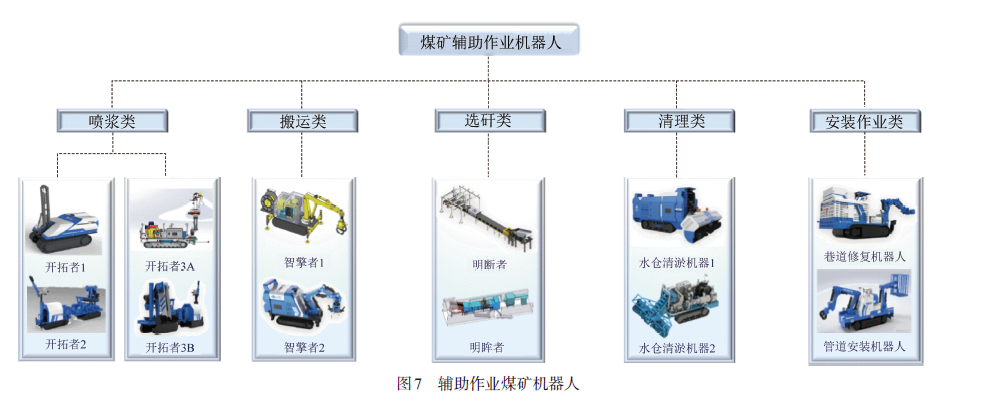
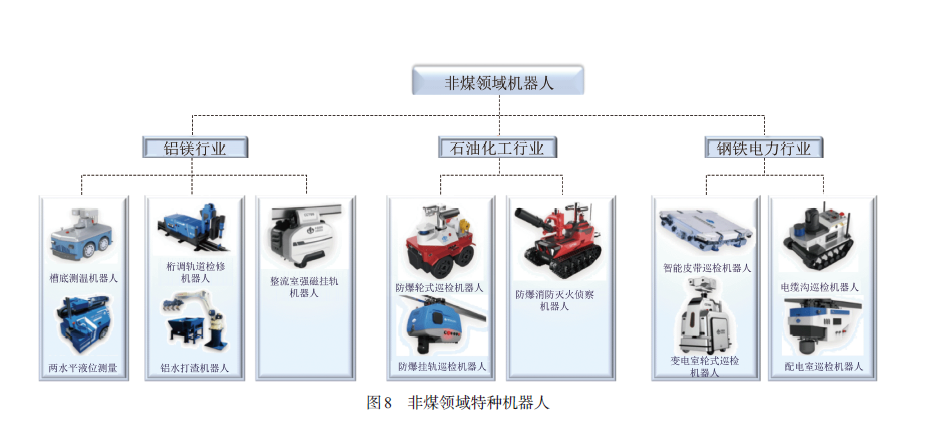
在产品成果方面,中煤科工机器人公司已研制出巡检类机器人共计7 种22 款(图6),其中轨道式巡检机器人4 种13 款,轮式巡检机器人3 种9 款。轨道机器人产品已成功应用于山西、内蒙古等省市50余家煤矿现场,减人、提效、增安效果显著;轮式机器人产品则在陕西、内蒙古等省市30 余家煤矿现场得到应用,实现了巡检场景累计提高巡检效率2倍以上。研制出辅助作业机器人总计6 种12 款(图7),包含有喷浆、抓管、搬运、选矸等系列机器人,已在宁夏回族自治区、陕西等省市煤矿现场展开应用,单班作业人员累计减少50%以上。研制了应用于铝镁、石油石化、钢铁电力行业的非煤领域特种机器人共6 种12 款(图8),其产品已在辽宁、新疆、内蒙古等铝镁、石油石化行业现场进行应用。
在技术成果方面,主要体现在智能感知、决策控制与智能执行,攻克了图像识别、声音识别、导航定位等关键技术共计20余项,已成功赋能于巡检及辅助作业机器人,大幅提升了机器人产品的实用性。
在产业链建设方面,采用基础固链、技术补链、融合强链工程方式,助力解决产业链短板、堵点及“卡脖子”技术等突出难题。牵头中国煤炭科工集团煤矿机器人产业链的建设工作, 通过科研院所、零部件制造商、煤矿企业“产学研用”的协同发展,推动机器人产业供应链、学科协作链的不断完善,为行业的健康发展提供支撑。梳理形成了包含核心元器件厂商、科研院所、各大高校、煤矿企业、电力企业、石油以及铝镁企业等300 余家企业清单,已与其中100 余家单位达成合作共识,推动了矿山机器人产业链上下游间的协同创新和配套对接。
未来发展规划
鉴于政策导向和市场需求,结合中煤科工机器人公司已有产品成果,对于巡检类机器人,主要规划煤仓巡检、回风立井巡检、采空区飞行巡检等特殊场景巡检机器人研发,解决由于场景应用难度较大、现有技术不成熟而无法应用的问题。对于辅助作业类机器人规划煤仓清理、托辊更换及水仓水沟施工等5 种辅助作业机器人的研发,真正解决井下危重场合替人难题,提高作业效率,保证煤矿安全生产。救援类机器人规划仿生蛇形、起缝及水陆两栖3 种产品的研发,能够应用于煤矿水灾、火灾等人员无法进入的区域场景,完成灾情的精准探测。未来,中煤科工机器人公司将以煤矿机器人应用服务平台为抓手,加强跨行业多部门的协同工作,充分发挥部门、地方、行业、用户等多方力量,在国家工信部和国家矿山安全监察局的指导下,补短板、堵卡点,抢占关键技术研发高地,构建出以科技驱动、要素集聚、价值迭代的创新生态圈,进一步提升基础固链、技术补链、融合强链和优化塑链能力,从而成为中国矿山机器人原创技术策源地及现代产业链链长,引领矿山机器人向行业规模化、生态化、协同化发展。
- 相关推荐
